2.2 Componentes digitales en las ECUs
Todos los componentes digitales presentes en una ECU están relacionados con el microcontrolador, que es un componente electrónico digital capaz de ejecutar uno o más programas de control. A diferencia de un microprocesador, un microcontrolador dispone de una serie de periféricos para el control, como por ejemplo, los circuitos de adquisición de señales.
En la figura 2 se muestra la imagen de un microcontrolador y su estructura interna típica aparece en la figura 3.
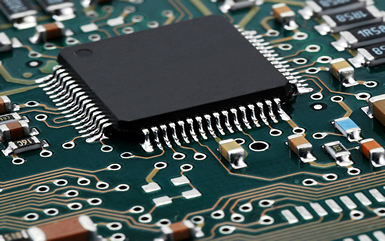
Figura 2. Fotografía de un microcontrolador montado en un PCB. Los componentes pequeños que se ven alrededor del microcontrolador (componente negro más grande) son componentes electrónicos de tipo SMD. Imagen obtenida de http://www.dytecnci.com/ solo para fines educativos.
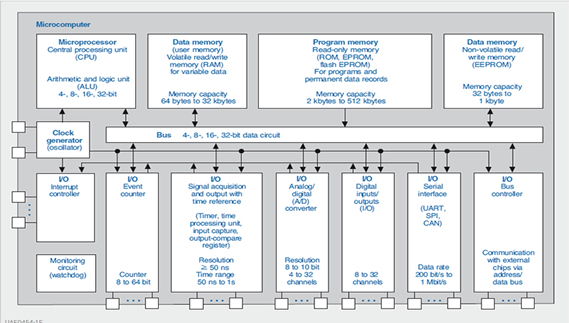
Figura 3. Estructura de un microcontrolador moderno. De: Bosch, R. (2013). Bosch Automotive Electrics and Automotive Electronics. Systems and Components, Networking and Hybrid Drive (5ªed.). Alemania: Springer.
Un microcontrolador consiste en una unidad central de procesamiento o CPU (Central processing unit) rodeada de una serie de componentes auxiliares y periférico. La CPU contiene la unidad de control y la unidad aritmética y lógica (ALU). La unidad de control ejecuta las instrucciones del programa, mientras que la ALU desarrolla las operaciones aritméticas y lógicas.
Entre los componentes auxiliares y periféricos cabe mencionar:
 Haz clic en los componentes auxiliares y periféricos para conocer más detalle.
Haz clic en los componentes auxiliares y periféricos para conocer más detalle.
Manejan el intercambio de datos con los dispositivos periféricos que incluyen los circuitos de adquisición de señales y los medios de almacenamiento de la información.
Contiene el programa del usuario (o programa operativo) que necesita ser almacenado de manera permanente.
Se consulta utilizando lecturas y escrituras a la memoria de acceso casual (Random Access Memory – RAM) y contiene los datos que están siendo procesados. También existen memorias de tipo no volátil que almacenan datos que no pueden perderse a pesar de interrupción de la alimentación.
Conecta la CPU con los otros circuitos auxiliares y periféricos.
Asegura que todas las operaciones del microcontrolador se desarrollan siguiendo el mismo patrón de tiempos.
Son módulos con tareas especializadas, por ejemplo, las interrupciones de programa. Los circuitos lógicos están integrados en las unidades de entradas y salidas.
Un aspecto muy importante que hay que tomar en cuenta al estudiar un microcontrolador, es su capacidad de ser programados. Programar un microcontrolador significa grabar en la memoria programable la secuencia de instrucciones que contribuyen al programa operativo de la CPU. El único comando que un microcontrolador puede interpretar es una secuencia de bit, o en otros términos, una representación binaria de un número. Intuitivamente se puede deducir que las instrucciones plasmadas en esta forma no son sencillas o por lo menos prácticas de programar por un operador humano acostumbrado a otro tipo de lenguaje. Es por esto, que para facilitar el trabajo de los programadores de microcontroladores se han establecidos lenguajes basados en abreviaturas sencillas de recordar.
El más famoso entre estos tipos de lenguajes es el lenguaje ASSEMBLER. Una vez que un programa operativo ha sido escrito en lenguaje ASSEMBLER, se pasa a su traducción en lenguaje máquina (el único lenguaje que puede interpretar un microcontrolador).
Para sistemas más complejos se han desarrollados lenguajes de más alto nivel, por ejemplo, el lenguaje C. El propósito de estos lenguajes es simplificar la programación de tareas complejas, que programadas en lenguaje ASSEMBLER serían sujetas a errores.
El programa de control de una ECU se denomina programa de la unidad de control (Control unit software).