7.2 Protocolo LIN
Debido al aumento del uso de sistemas mecatrónicos en los vehículos, se tuvo la idea de diseñar un sistema bus con costos eficientes como alternativa al CAN de baja velocidad. Es por esto que, en 1998, se creó una comisión conformada por distintos fabricantes automotrices con el objetivo de desarrollar la especificación de un bus serial para conectar sensores y actuadores en el área electrónica. La especificación resultante fue LIN bus, que fue implementado en la producción del Mercedes-Benz SL en el año 2001.
Se le dio el nombre de LIN (Local Interconnect Network) debido al hecho de que todas las unidades de control electrónico están localizadas dentro de un mismo espacio (por ejemplo, la puerta). Por lo tanto, LIN bus es un subsistema local del bus CAN.
El LIN bus es adecuado para tasas bajas de datos de hasta 20 kBit/s y se limita típicamente a un máximo de 16 suscriptores.
En cuanto a los nodos, se hace una distinción entre el maestro, que es usualmente una unidad de control electrónico (ECU) conectado a un bus de orden superior y los esclavos. Estos son actuadores inteligentes, sensores inteligentes o switches.
El LIN bus puede ser usado en muchas aplicaciones en el vehículo, para las cuales la tasa de bits y la variabilidad del bus CAN no son esenciales.
El LIN bus está diseñado como una línea unifilar sin blindaje. El bus puede tomar dos estados lógicos:
El nivel dominante corresponde a un voltaje de aproximadamente 0 V y representa al 0 lógico.
El nivel recesivo corresponde al voltaje de la batería Ubat y representa el 1 lógico.
La tasa de datos de LIN bus está limitada a un máximo de 20 kBit/s. Se recomienda tasas de bit estándar de 2,400 Bit/s, 9,600 Bit/s y 19,200 Bit/s. El valor mínimo permitido es 1 kBit/s para prevenir conflictos.
No se especifica un máximo número de nodos. Teóricamente, está limitado por el número disponible de identificadores. En la práctica, el número de usuarios se restringe a 16 debido a la capacidad máxima permitida del sistema bus.
El acceso al LIN bus está determinado por la relación maestro-esclavo. Cada mensaje es iniciado por el maestro. El esclavo tiene la posibilidad de responder. Los mensajes son intercambiados entre el maestro y uno, varios o todos los esclavos (punto a punto, multicast, broadcast).
Las siguientes relaciones son posibles en la comunicación entre maestro y esclavo:
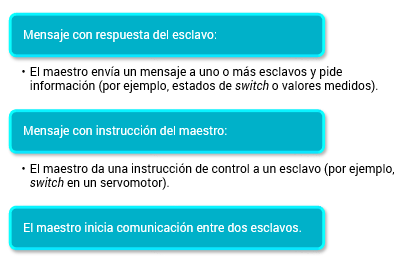
La información transferida en el LIN bus está embebida en un marco definido. El mensaje iniciado por el maestro siempre inicia con un header o encabezado. La respuesta (message field) contiene diferente información dependiendo del tipo de mensaje.
Si el maestro desea transmitir instrucciones de control al esclavo, llenará la respuesta con información que será usada por el esclavo. Si el maestro está transmitiendo una petición de información, el esclavo al cual se está comunicando llenará la respuesta con la información solicitada por el maestro.
El encabezado está compuesto de las siguientes partes:
- El espacio de sincronización (synchronization break).
- El campo de sincronización (synchronization field).
- El campo del identificador (identifier field).
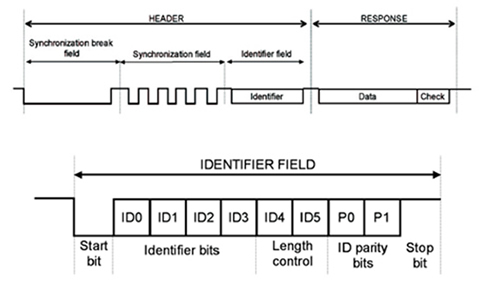
Figura 3. Formato mensaje LIN Bus
Embedded Systems (Noviembre, 2002). Design flexibility key to simplifying the implementation of LIN.Disponible en: http://www.eetimes.com/document.asp?doc_id=1200945
Para garantizar una transferencia consistente entre maestro y esclavo, ocurre una sincronización al principio de cada marco. Primeramente, el inicio de un marco es señalado por el espacio de sincronización (SynchBreak). El SynchBreak abarca al menos 13 niveles dominantes consecutivos y un nivel recesivo. Al final del SynchBreak, el maestro envía el campo de sincronización (SynchField) consistente de la secuencia de bit 01010101. Después de esto, los esclavos son capaces de ajustarse a sí mismos al tiempo base del maestro y así sincronizarse. El tercer bit en el encabezado es usado como el identificador LIN.
Una vez que el encabezado enviado por el nodo maestro ha sido transmitido es tiempo de que inicie la transferencia de datos. Los esclavos saben por el identificador transmitido si se les está llamando o no y, en caso de ser llamados, responden mediante el campo de datos (data field).
Durante la transferencia de bytes, el bit menos significativo es el primero en salir. Cada byte (8 bits) es precedido por un bit de inicio y seguido por un bit de paro, lo que significa que cada byte involucra la transmisión de diez bits.
La respuesta de los esclavos es verificada por el checksum.
Como resumen, las características esenciales del LIN bus son:
- Maestro único/múltiples esclavos.
- Control de acceso maestro/esclavo
- Posible sincronización independiente del esclavo.
- Transmisión de señal determinística.
- Comunicación por medio de mensajes cortos.
- Transmisión basada en caracteres (UART).
- Tasa de bit con máximo de 20 kBit/s.
- Transferencia de datos por medio de cable unifilar sin blindaje.
- Los potenciales de referencia de la línea de datos son el voltaje de la batería y la tierra.
- Longitud de bus máximo de 40 m.
- Máximo de 16 nodos, típicamente menos de 12.