8.1 Protocolo MOST
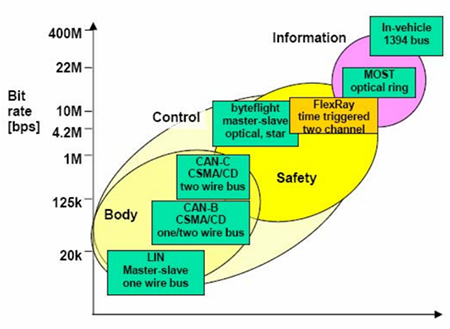
El bus MOST (Media Oriented Systems Transport) fue específicamente diseñado para la comunicación de red de los sistemas entretenimiento en un vehículo. En adición a las funciones tradicionales de entretenimiento, como el radio o CD players, dichos sistemas también ofrecen funciones de video (DVD y TV), habilidades de guía de ruta y acceso a comunicaciones móviles. Estos sistemas se identifican también como sistemas de comunicación infotainment.

Los sistemas infotainment requieren una alta tasa de transmisión de datos y de sincronización entre la fuente y el receptor, así como entre receptores. Actualmente, puede ser encontrado en más de 35 modelos de vehículos de distintos fabricantes.
El bus MOST soporta la conexión lógica de hasta 64 dispositivos. En su versión actual, el bus MOST ofrece tasas de transferencia de datos de 24.8 MBit/s (MOST 25). Algunas versiones con tasas más altas de 50 Mbit/s (MOST 50) y 150 Mbit/s (MOST 150) ya están disponibles para modelos en desarrollo.
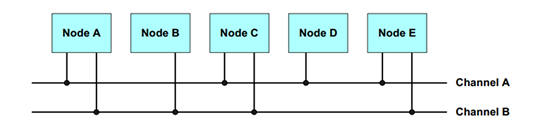
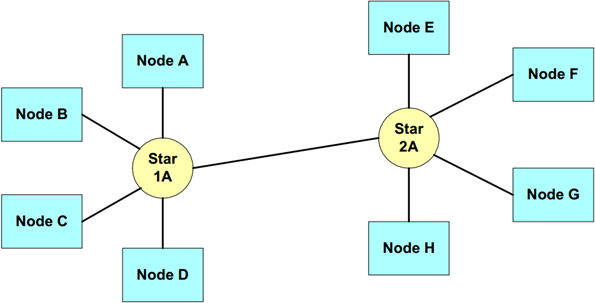
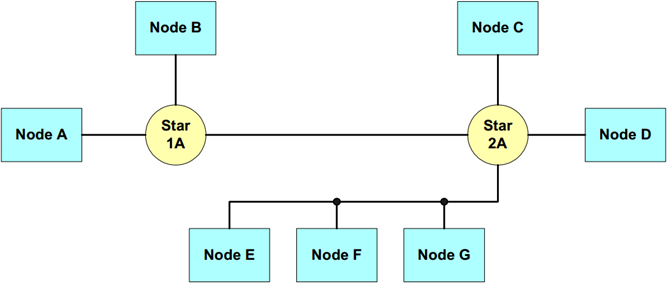
El sistema MOST está configurado en una topología tipo anillo, donde un dispositivo está conectado a su predecesor o sucesor en el anillo por medio de una entrada o salida, respectivamente. Uno de los dispositivos actúa como el temporizador maestro y genera marcos de datos para transferencia de información con los cuales los otros dispositivos se sincronizan.
Existen otras posibles estructuras para un sistema MOST, por ejemplo, la topología tipo estrella. Sin embargo, internamente éstas deben configurarse para formar un anillo (lógico).

Figura 1. Topología de la red MOST.
Bosch, R. (2013). Bosch Automotive Electrics and Automotive Electronics. Systems and Components, Networking and Hybrid Drive (5th Ed.). Germany: Springer.
Originalmente, el bus MOST se definió como un agente de transmisión óptico que usa fibra óptica plástica (POF). Los cables POF usados en aplicaciones automotrices consisten de un núcleo óptico de 980 µm de grueso, protegido por una capa de 20 µm con bajo índice de refracción. Por lo tanto, en total, el conductor óptico tiene un diámetro de 1 mm.
La transferencia de datos en el bus MOST está organizada en tramas de datos, las cuales son generadas por el temporizador maestro con una tasa de transferencia fija y pasada a otros dispositivos en el anillo.
Normalmente, el temporizador maestro genera tramas de datos con un ciclo de 44.1 kHz., y en casos más raros 48 kHz. El ciclo es definido por el fabricante para satisfacer los formatos en su sistema. El tamaño de la trama de datos, por extensión, determina la velocidad del bus. En el MOST 25, el tamaño de la trama de datos es de 512 bits.
La trama de datos está compuesta por los siguientes campos:
- Áreas para información administrativa al principio y fin de la trama. Se incluyen tareas como la sincronización, determinar la posición de los dispositivos en el anillo y la transmisión del descriptor de límite.
- Área para canal de control (con MOST 25, dos bytes por trama de datos).
- Área para los canales síncronos.
- Área para canales asíncronos.
En el caso de MOST 25, las áreas síncronas y asíncronas demandan 60 bytes de la trama. La distribución entre los canales síncronos y asíncronos está determinada por el valor del descriptor límite con una resolución de 4 bytes. El área síncrona debe tener al menos 24 bytes (6 canales estéreo). Esto significa que de 24 a 60 bytes están permitidos para el área síncrona y de 0 a 36 bytes para el área asíncrona.
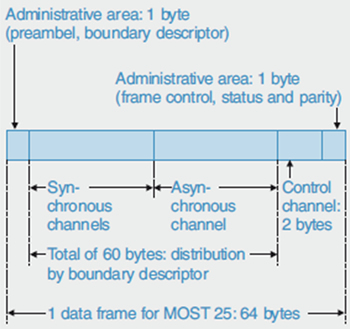
Figura 2. Estructura de un frame MOST.
Bosch, R. (2013). Bosch Automotive Electrics and Automotive Electronics. Systems and Components, Networking and Hybrid Drive (5th Ed.). Germany: Springer.
El estándar MOST define un protocolo adecuado en la capa de aplicación para la transmisión de comandos de control, información y eventos. Este protocolo hace posible abordar una función específica de una interfaz de aplicación (por ejemplo, un FBlock). Por ejemplo, es posible empezar a escuchar un CD en un CD player separado o pedir el número de canción que se escucha actualmente.
El protocolo para control de mensajes provee los siguientes elementos de un mensaje de control:
- La dirección de un dispositivo en el sistema MOST (DeviceID).
- Un identificador para un FBlock (FBlockID) y su petición en el sistema (InstID).
- El identificador para la función requerida dentro del FBlock (FktID).
- El tipo de operación (OpType) que debe ser aplicada a la función.
- Un rango de datos conteniendo los parámetros de la función para llamar (Data) y su longitud correspondiente (Length).
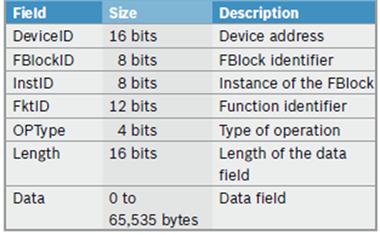
Figura 3. Elementos de un mensaje de control MOST.
Bosch, R. (2013). Bosch Automotive Electrics and Automotive Electronics. Systems and Components, Networking and Hybrid Drive (5th Ed.). Germany: Springer.