7.1 Sistemas de iluminación
La iluminación es la parte más crítica dentro de un sistema de visión. Las cámaras capturan la luz reflejada de los objetos. El propósito de la iluminación utilizada en las aplicaciones de visión es controlar la forma en que la cámara verá el objeto. La luz se refleja de forma distinta si se ilumina una bola de boliche, que si se ilumina una hoja de papel blanco y el sistema de iluminación por lo tanto debe ajustarse al objeto a iluminar.
Hay un cierto número de consideraciones a tener en cuenta para determinar la mejor iluminación para una aplicación:
- ¿Es en color o monocromático?
- ¿Es de alta velocidad o no?
- ¿Cuál es el campo de visión a iluminar?
- ¿El objeto presenta superficies con reflejos?
- ¿Qué fondo presenta la aplicación: color, geometría?
- ¿Cuál es la característica a resaltar?
- ¿Qué duración debe tener el sistema de iluminación?
- ¿Qué requisitos ambientales deben considerarse?
Una buena iluminación de la escena es importante debido a su efecto sobre el nivel de complejidad de los algoritmos de procesamiento de imágenes requerido. Una iluminación deficiente hace más difícil la tarea de interpretar la escena. Las técnicas de iluminación adecuadas deben proporcionar un alto contraste y reducir al mínimo las reflexiones espectaculares y las sombras, a no ser que se diseñe específicamente en el sistema. Los tipos básicos de dispositivos de iluminación utilizados en la visión de máquina pueden agruparse en las categorías siguientes:
Haz clic para revisar la información
1. Iluminación mediante fibra óptica
Proporciona una gran intensidad de luz uniforme, con ausencia de sombras. Es ideal para iluminar objetos de reducidas dimensiones y se puede sujetar al objetivo de la cámara o a la óptica de un microscopio. Se les puede acoplar filtros de colores, polarizadores/analizadores y difusores para eliminar reflejos y aumentar el efecto difusor.
2. Iluminación mediante fluorescentes
Este tipo de iluminación proporciona una luz brillante, sin sombras. Las lámparas han sido diseñadas para suministrar el máximo de intensidad durante al menos 7 000 horas. Lo que proporciona una mayor productividad. Esta iluminación se aplica en entornos que requieren mucha luz, y ningún tipo de sombra (inspección de circuitos, laboratorios, control de calidad, fotografía, robótica, etc.).
4. Iluminación mediante láser
Los patrones láser se utilizan mayoritariamente en aplicaciones de medida de profundidad, y de superficies irregulares. Mediante ópticas especialmente diseñadas, se puede convertir un puntero láser, en diferentes formas y tamaños.
Varias técnicas de iluminación han sido desarrolladas para utilizar estos dispositivos de iluminación. La finalidad de estas técnicas es dirigir el recorrido de la luz desde el dispositivo de iluminación a la cámara, de modo que visualicen el sujeto de una manera adecuada para la cámara.
Hay dos técnicas básicas de iluminación utilizadas en la visión de máquina: iluminación frontal e iluminación posterior.
- La iluminación frontal significa simplemente que la fuente de luz está en el mismo lado de la escena que la cámara. En consecuencia, la luz reflejada se utiliza para crear la imagen visionada por la cámara.
- En la iluminación posterior la fuente de luz está dirigida a la cámara y situada detrás de los objetos de interés.
La imagen vista por la cámara es una silueta del objeto bajo estudio. La iluminación posterior es adecuada para aplicaciones en la que una silueta del objeto es suficiente para su reconocimiento o en donde exista la necesidad de obtener medidas importantes. A continuación se presenta una tabla, la cual indica otras técnicas diversas que pueden utilizarse para proporcionar iluminación.
Técnica |
Función/uso |
A. Fuente de luz frontal
- Iluminación frontal
- Iluminación especular (campo oscuro)
- Dispositivo formador de imágenes frontal
|
- Área iluminada de modo que la superficie defina la característica de imagen.
- Utilizada para el reconocimiento de defectos superficiales (fondo oscuro o luz de fondo).
- Aplicaciones de luz estructurada: la luz de las imágenes se superpone sobre la superficie del objeto.
|
B. Fuente de luz posterior
- Iluminación posterior (campo iluminado)
- Iluminación posterior (condensador)
- Iluminación desplazada posterior
|
- Utiliza un difusor superficial para las características de siluetas; se emplea en la inspección de piezas y medidas básicas.
- Produce imágenes de alto contraste; de utilidad para aplicaciones de gran ampliación.
- De utilidad para obtener imágenes destacadas cuando la característica está en un medio transparente.
|
C. Otros dispositivos misceláneos
- Divisor de haz
- Espejo dividido
- Redirectores no selectivos
- Retrorreflector
- Doble densidad
|
- Transmite luz a lo largo del mismo eje óptico del sensor; puede iluminar objetos de difícil visión.
- Similar al divisor de haz, con exigencias de intensidades más bajas.
- La fuente de luz se redirecciona para proporcionar una iluminación adecuada.
- Dispositivo que redirige los rayos incidentes hacia el sensor.
- Una técnica utilizada para aumentar la intensidad de iluminación en el sensor.
|
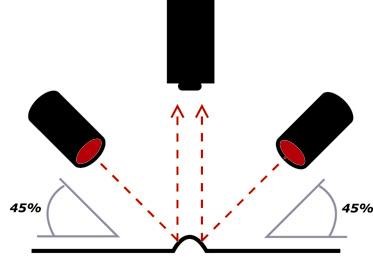
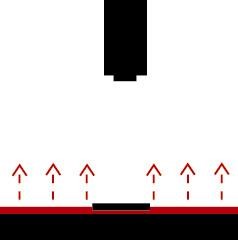
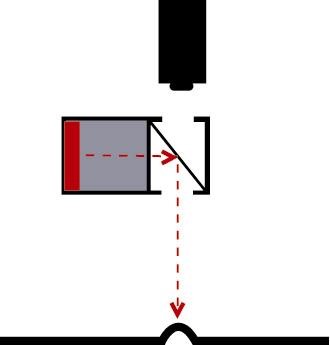
Para conseguir un campo de iluminación brillante, se requiere posicionar la cámara y la fuente de luz en posiciones específicas, tal como se indica en las siguientes figuras:
|
|
|
Fuente de luz frontal
(campo oscuro) |
Fuente de luz posterior |
Retrorreflector (misceláneo) |
7.2 Comparación de señal análoga contra la señal digital
Para una cámara que utiliza la tecnología de tubo vidicón es necesario convertir la señal analógica correspondiente a cada píxel a una forma digital. El proceso de conversión analógico/digital (A/D) implica la entrada de una señal de entrada analógica y la generación de una salida que represente la señal de voltaje en la memoria digital de una computadora.
Al realizar la conversión A/D y D/A aparecen errores y se tiene una parte de información de la señal continúa original. La conversión (A/D) está constituida por tres fases:
Haz clic para revisar la información
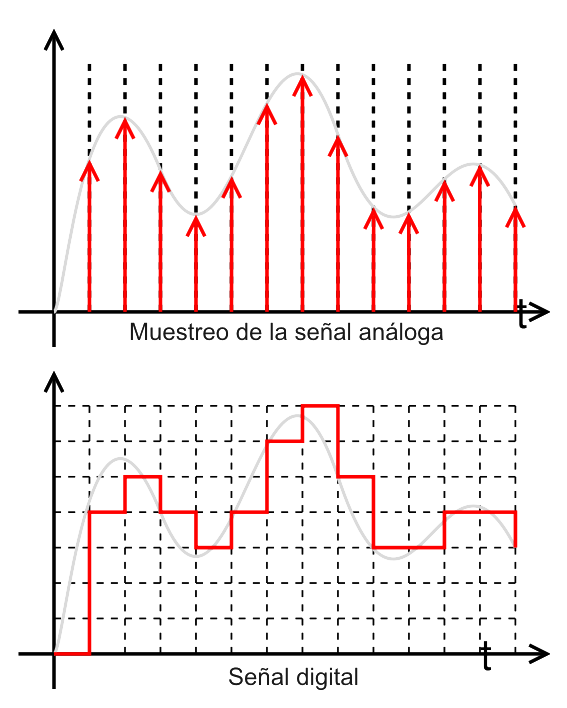
Proceso por el cual se obtiene una serie de muestras a partir de una señal continua. El tiempo de adquisición entre muestras se conoce como periodo de muestreo; en la mayor parte de las aplicaciones este tiempo es constante.
Una señal analógica dada se muestra periódicamente para obtener una serie de señales analógicas de tiempos discretos. Tal como se ilustra a continuación en la figura:
Groover, M., Weiss, M., Nagael, R. y Odrey, N. (1995). Industrial Robotics Technology, Programming and Applications. EE. UU: McGraw Hill.
Estableciendo una frecuencia de muestreo especificada, la señal analógica puede aproximarse mediante las salidas digitales muestreadas. El grado de aproximación de la señal analógica se determina por la frecuencia de muestreo del convertidor A/D. La frecuencia de muestreo debe ser al menos el doble que la más alta frecuencia de la señal de video, si se requiere reconstruir con exactitud dicha señal.
Después de muestrear se considera necesario cuantificar la señal. Cada nivel de voltaje de tiempo discreto muestreado se asigna a un número finito de niveles de amplitud definido. Estos niveles de amplitud corresponden a la escala de grises utilizada en el sistema. Los niveles de amplitud predefinidos son característicos para un convertidor A/D particular y están constituidos por un conjunto de valores discretos de niveles de voltaje. El número de niveles de cuantificación se define por:
Número de niveles de cuantificación = 2n
En donde n es el número de bits del convertidor A/D. Un gran número de bits permite que una señal se represente con más precisión. Por ejemplo, un convertidor de 8 bits nos permitiría cuantificar en 28 = 256 valores diferentes, mientras que 4 bits permitirían solamente 24 = 16 niveles de cuantificación diferentes.
Los niveles digitales son el equivalente a los niveles de cuantificación. El rango dinámico es la diferencia entre los niveles máximo y mínimo de x(n). Cuando se sobrepasa el rango del conversor, se tiene el ruido de sobrecarga.
Al cuantificar la señal se comete un error conocido, evidentemente, como error de cuantificación, que es irreversible. Se introduce ruido a la señal que se conoce como ruido de cuantificación.
Los niveles de amplitud que se cuantifican deben cambiarse al código digital. Este proceso, denominado codificación, implica la representación de un nivel de amplitud mediante una secuencia de dígitos binarios. La capacidad del proceso de codificación para distinguir entre varios niveles de amplitud es una función del espaciamiento de cada nivel de cuantificación. Dado el rango de escala completa de una señal de video analógico, el espaciamiento de cada nivel se definiría por:
| Espaciamiento nivel cuantificación: |

|
El error de cuantificación resultante del proceso de cuantificación puede definirse como:
Error cuantificación: ± ½ (espaciamiento nivel cuantificación)
Ejemplo: Una señal de vídeo continua ha de convertirse en una señal discreta. El rango de amplificación de la señal es de 0 a 5 volts. El convertidor A/D tiene una capacidad de 8 bits. Determinar el número de niveles de cuantificación, el espaciamiento del nivel de cuantificación, la resolución y el error de cuantificación.
Solución: Para una capacidad de 8 bits, el número de niveles de cuantificación es 28 = 256. La resolución del convertidor A/D es 1/256 = .0039 o 0.39%. Para el rango de 5V se tiene:
Espaciamiento nivel cuantificación: (5V)/(28 ) = .0195 Volts
Error cuantificación: ± ½ (.0195 Volts) = .00975 Volts
La representación de la señal de voltaje en forma binaria implica el proceso de codificación. Este último se realiza asignando la secuencia de dígitos binarios para representar niveles de cuantificación crecientes. En nuestro ejemplo anterior, la señal de voltaje puede indicarse de forma binaria. De los 8 bits disponibles podemos utilizar estos bits para representar niveles de cuantificación crecientes como sigue:
Rango de Voltaje, Volts |
Número binario |
Escala de grises |
0-.0195 Volts |
0000 0000 |
0 (negro) |
.0195-.0390 Volts |
0000 0001 |
1 (gris oscuro) |
.0390-.0585 Volts |
0000 0010 |
2 |
-------------------------------- |
-------------------------------------- |
------------------------------------ |
4.9610-4.9805 Volts |
1111 1110 |
254 (gris claro) |
4.9805-5.0 Volts |
1111 1111 |
255 (blanco) |
Después de la conversión A/D, la imagen se almacena en la memoria de la computadora, que suele denominarse un buffer de cuadro. Este buffer puede ser parte del captador de trama o estar en la propia computadora. Varias técnicas se desarrollaron para adquirir y acceder a las imágenes digitales. En condiciones ideales sería deseable adquirir un cuadro único de datos en tiempo real. El captador de trama es un ejemplo de un dispositivo de adquisición de datos de video que almacenará una imagen digitalizada y la adquirirá en 1/30 segundos. Los cuadros digitales suelen cuantificarse en 8 bits por píxel. Sin embargo, un buffer es apropiado puesto que el sistema de cámara medio no puede producir 8 bits de datos exentos de ruido. Por consiguiente, los bits de peso más bajo se eliminan como un medio de limpieza de ruido.
Además, el ojo humano sólo puede resolver (separar) unos 26 = 64 niveles de gris. Una combinación de contadores de filas y columnas se utiliza en el captador de trama, que se sincronizan con la exploración del haz electrónico de la cámara. De este modo, cada posición en la pantalla puede direccionarse de forma unívoca. Para leer la información almacenada en el buffer de trama, los datos se captan mediante una señal enviada desde la computadora a la dirección correspondiente a una combinación de fila-columna. Dichas técnicas de captador de trama se han hecho muy populares en la mayoría de los sistemas de visión.
Con base en lo anterior, es posible determinar las características, así como las ventajas y desventajas de una imagen digital en comparación de una imagen analógica, tal como se muestra en la siguiente tabla comparativa:
Características |
Almacenamiento Analógico |
Almacenamiento Digital |
Capacidad de almacenamiento |
Compromiso entre la amplitud de la señal y la frecuencia máxima almacenada. Dificultad en escribir transiciones rápidas/lentas sin destellos molestos. |
La frecuencia máxima almacenada es independiente de la amplitud. El modo de envolvente permite detectar glitches a cualquier velocidad de barrido. |
| Ancho de Banda |
Fijo, determinado por la respuesta del amplificador o velocidad de escritura.
Fijo, determinado por la respuesta del amplificador o velocidad de escritura. |
Variable, determinado por la velocidad de digitalización TIME/DIV.
El solapamiento crea señales falsas; los impulsos estrechos no se almacenan. |
| Problemas al superar el ancho de banda |
| Resolución |
Uniforme, verticalmente limitada por el perfil del punto, Horizontalmente limitada por la altura de la traza.
Las características de error son independientes de la señal de entrada; la atenuación debida a la limitación de banda, linealidad, etc., puede medirse y utilizarse para mejorar la precisión de la medida. |
Resolución vertical cuantificada; resolución horizontal limitada por el tamaño de memoria y el tipo de reconstrucción de la presentación. |
Errores de medida
|
Las características del error dependen de la relación de temporización entre la señal de entrada y el reloj de muestreo; los errores máximos son del mismo orden que los de los sistemas analógicos, pero las características de error no permiten su utilización para mejorar la precisión. |
7.3 Velocidad de captura
La velocidad de muestreo expresada en función de la frecuencia (20 x 106 muestras por segundo), equivale a decir que la velocidad de muestreo es de 20 MHz. A veces se cita la velocidad de información, es decir, el número de bits de datos almacenados en un segundo (160 millones de bits por segundo).
Para efectuar la conversión entre ambos valores basta con dividir la velocidad de la información entre el número de bits utilizado por el conversor A/D (en este caso, suponiendo un conversor de 8 bits, sería 160 x 106 bits dividido entre 8, lo que es igual a 20 x 106 muestras por segundo). En otras ocasiones, se expresa en función del intervalo de muestreo, como una relación tiempo/ puntos (50 ns por punto), el inverso de la frecuencia.
Para determinar la velocidad de digitalización para una determinada posición del mando TIME/DIV, se emplea la fórmula:
| Velocidad de digitalización = |
|
El número de palabras de datos por división es:
| Palabras de datos por visión = |

|
Indica la rapidez con la que un osciloscopio adquiere formas de onda completas.
Un DPO permite un nivel superior de observación del comportamiento de la señal, proporcionando velocidades de captura de forma de onda mucho más grandes y una presentación tridimensional, convirtiéndose en la mejor herramienta de diagnóstico y localización de fallos en diseños de tipo general para un amplio rango de aplicaciones.