9.1 Identificación de patrones
El próximo paso en el procesamiento de los datos de la imagen es identificar el objeto que la imagen representa. Este problema de identificación se resuelve utilizando la información sobre las características extraídas del objeto. El algoritmo de reconocimiento debe ser lo suficientemente potente para identificar unívocamente al objeto. Las técnicas de reconocimiento de objeto utilizadas hoy en día en la industria se pueden clasificar dentro de dos características principales:
Haz clic en cada botón para obtener más información
Las técnicas de coincidencia de plantilla son un subconjunto de las técnicas estadísticas más generales de reconocimiento de modelos, que sirven para clasificar los objetos en una imagen dentro de las categorías predeterminadas. El problema básico de la coincidencia de plantilla es comparar el elemento con un conjunto de características del modelo almacenado, definido como modelo de plantilla. Este último modelo se obtiene durante el procedimiento de adiestramiento en el que el sistema de visión se programa para reconocer los elementos prototipos conocidos. Estas técnicas son aplicables si no existen requerimientos para un gran número de plantillas de modelos. El procedimiento está basado en el uso de un número suficiente de características para minimizar la frecuencia de errores en el proceso de clasificación. Las características del elemento en la imagen (por ejemplo, su área, diámetro, relación de aspecto, etc.) se comparan con los valores correspondientes almacenados. Estos valores constituyen la plantilla almacenada. Cuando se encuentra una coincidencia, permitiéndose determinadas variaciones estadísticas en el proceso de comparación, entonces el elemento ha sido clasificado de forma adecuada.
Las técnicas estructurales de reconocimiento de modelos consideran las relaciones entre las características o bordes de un objeto. Por ejemplo, si la imagen de un objeto se puede subdividir en cuatro líneas (las líneas reciben el nombre de primitivas) conectadas en sus puntos extremos y las líneas conectadas forman ángulos rectos, entonces el objeto es un rectángulo. Esta clase de técnica, conocida como reconocimiento de modelo sintáctico, es la técnica estructural usada con más frecuencia. Las técnicas estructurales difieren de las técnicas de decisión teórica, en que estas últimas tratan a un modelo sobre una base cuantitativa y en que se ignoran la mayoría de las interrelaciones de partes entre las primitivas de un objeto.
Puede considerarse excesivo el tiempo necesario para el reconocimiento completo de un modelo. En consecuencia, suele ser más adecuado en la búsqueda de regiones más simples o bordes dentro de una imagen. Estas regiones más simples pueden utilizarse para extraer las características requeridas. La mayor parte de los sistemas comerciales de visión hacen uso de este método para el reconocimiento de los objetos bidimensionales. Los algoritmos de reconocimiento se utilizan para identificar cada uno de los objetos segmentados en una imagen y para asignarlos a una clasificación (por ejemplo, tuerca, perno, brida, etc.).
Luz estructurada
El término luz estructurada se define como la proyección de patrones de luz simple o codificada (es decir, puntos, líneas, redes, formas complejas) en la escena iluminada. El principal beneficio de utilizar la luz estructurada es que las funciones de las imágenes tienen mejor definición. Como resultado, tanto la detección y extracción de características de la imagen es simplificada y más robusta.
En cuanto al dispositivo de emisión de luz, puede ser coherente (por ejemplo, los diodos láser) o incoherente (por ejemplo, dispositivos de cristal líquido (LCD) proyectores). El uso de proyectores LCD en sistemas estéreo activos puede ser rastreado desde principios de los 80. Estos sistemas se han vuelto muy populares, entre los trabajos de investigación, gracias a su atractivo costo y menos restricciones de seguridad en comparación con sus dispositivos basados en láser. Por otro lado, los proyectores para sistemas estéreo activos pueden ser la mejor opción para aplicaciones industriales. Estos sistemas, a menudo llamados escáner gama, se utilizan comúnmente en aplicaciones de robótica. A diferencia de los sistemas basados en LCD, los sistemas basados en láser pueden ser más pequeños y dar mayor potencia de iluminación. Además, gracias a su coherente característica, la cámara puede estar equipada con filtro óptico especial para mejorar tanto la detección y extracción de características de la imagen. Los patrones de luz proyectados se pueden agrupar en tres categorías: los patrones de punto, patrones de rayas y patrones de color. La posición, la orientación y las formas de los patrones de luz pueden ser alteradas o dejar sin cambios durante el proceso de escaneado.
Identificación de patrones por rayas | Identificación de patrones de color | Identificación de patrones por punto. |
El patrón geométrico simple de esta categoría, es la proyección de un solo rayo de luz o un plano en la escena. La intersección de este patrón de luz con la superficie de cualquier objeto en la escena produce una franja de luz visible en imágenes capturadas. Esta técnica supera a la técnica basada en patrones por punto como un conjunto más amplio de medidas en 3D, puede ser obtenida a partir de una sola imagen. Una vez más, con el fin de reducir el número de imágenes capturadas varias franjas de luz pueden proyectarse sobre la escena al mismo tiempo. Sin embargo, para estos sistemas, el problema de correspondencia está lejos de ser trivial. Para hacer frente a este problema, un patrón de rayas codificado puede ser utilizado. En efecto, mediante el llamado enfoque temporal con código de luz la correspondencia se puede resolver directamente como cada punto iluminado en la superficie de cualquier objeto en la escena se asocia con un código binario único. Como resultado, cada punto puede ser distinguido únicamente de sus vecinos adyacentes. |
Un inconveniente de los sistemas de estéreo activos utilizando patrones de rayas codificados es que la adquisición de imágenes es secuencial dependiendo del código generado. Como resultado, sólo escenas estáticas se pueden escanear con tales sistemas. Para superar esta situación, el uso de patrones de rayas estáticas o incluso patrones de color es obligatorio. De hecho, la información de color puede ser utilizado para etiquetar cada plano de luz del patrón proyectado.
Esta técnica permite recoger mediciones en 3D densas a partir de una sola imagen. Tales proyectos activos un sistema estéreo de color patrones de bandas que se pueden arreglar, ya sea en patrones paralelos o de cuadrícula. Por otra parte, a fin de obtener flexibilidad durante el proceso de adquisición de adaptación, las técnicas de color pueden utilizarse. Estos sistemas estéreo activos pueden adaptar el color del patrón proyectado para abordar el problema de las reflexiones de la luz generada por el objeto escaneado. |
Un sistema estéreo activo que proyecta un patrón de puntos es el método más sencillo para medir distancias entre la plataforma y los puntos de la superficie de los objetos analizados. El problema es la correspondencia de hecho es trivial. Sin embargo, sólo una medida puede ser obtenida de una sola posición ya sea del proyector, la cámara o la plataforma. Como resultado, toda la escena que se debe digitalizar para recoger mediciones 3D densas. A fin de aumentar medición de valores de una sola imagen, varias obras proponen proyectar varios puntos ya sea dispuesto en línea o en una rejilla de patrones. |
Aprendizaje de los sistemas de visión
El objetivo del aprendizaje de los sistemas de visión es programar a estos para que reconozcan objetos conocidos. El sistema almacena estos elementos en forma de compendio de valores da características extraídas que, a continuación, pueden compararse con los correspondientes valores de características obtenidos a partir de objetos desconocidos. Las características utilizadas con más frecuencia en los sistemas de visión se examinaron en el tema 8 en el punto 8.3 detección de patrones.
La identificación de patrones de los sistemas de visión debe realizarse bajo condiciones tan próximas a las condiciones de funcionamiento como fuere posible. Los parámetros físicos tales como emplazamiento de la cámara, ajustes de la apertura, situación del elemento e iluminación son las condiciones críticas que deben simularse como posibles durante el aprendizaje.
El esquema del sistema de visión para la interpretación de objetos, idealmente debe de quedar de la forma como se ilustra en la figura. Tomando en consideración la importancia de la calibración de la máquina, para completar el ciclo del sistema de visión, la cual se explicará detalladamente en el siguiente tema.
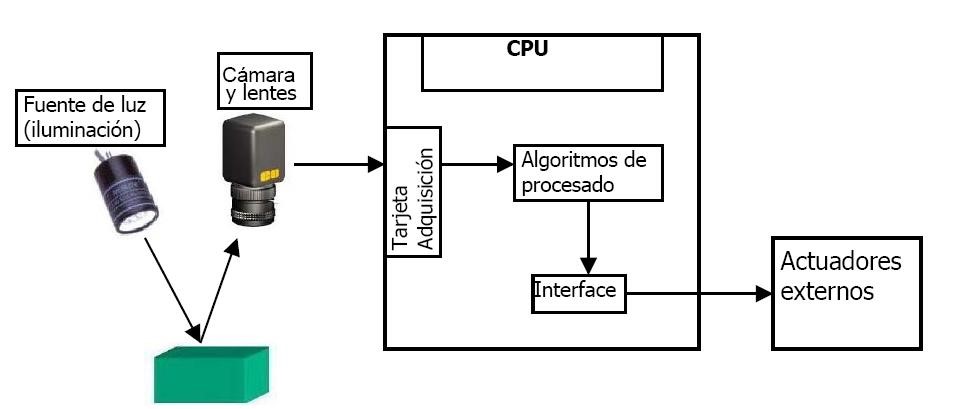
Imagen tomada de http://formacion.faico.org/Proyectos/ROBINDUSTRIA/SistemasDeVisionArtificial.htm
Sólo para fines educativos.
9.2 Identificación de fallas
La falla más común que se produce en la interpretación de imágenes y que es necesario tomar en cuenta son las distorsiones, estás se producen durante la formación de imágenes.
Distorsión radial
El uso de lentes facilita la entrada de la luz, un apropiado enfoque y la versatilidad adecuada, pero también introduce distorsiones en las imágenes formadas en el sensor. Uno de estos efectos es la distorsión radial o distorsión de barril, y se muestra esquemáticamente en la siguiente figura. Esta distorsión es debido a las lentes de rayos que pasan más lejos del centro óptico, las cuales afectan la incidencia de aquellos que directamente pasan cerca del centro de la lente.
Este tipo de distorsión es más pronunciada en la zona cercana a los límites de las imágenes, como se puede ver en el ejemplo de abajo. Es importante señalar que también crece con la disminución de longitud focal de la lente utilizada o cuando más pobre se utiliza la óptica de calidad.

Imagen obtenida de http://www.cipa.dcu.ie/roadis/dis.html. Solo para fines educativos.
Distorsión tangencial
Puede ser que durante el proceso de manufactura, el sensor está conectado firmemente a la pared sobre la que descansa. De esta manera la lente no será utilizado paralela al plano donde la imagen se forma.
9.3 Reconstrucción en 3D
La reconstrucción 3D es el proceso por el cual los objetos son escaneados en un sistema de coordenadas X, Y, Z, utilizando una codificación por el método de la agrimensura, manteniendo las características físicas del objeto (tamaño, volumen y forma). Por lo tanto, se emplea un procedimiento de calibración o los parámetros del sistema, convierte la secuencia de imágenes adquiridas y procesadas digitalmente, a la escala completa del objeto. Por esta razón, los métodos de reconstrucción 3D son una herramienta útil en aplicaciones en las que la información topográfica juega un papel importante en la toma de decisiones; como para el control de calidad, el modelado 3D de objetos industriales y exploraciones funcionales de deformación en la espalda o en otras partes del cuerpo, entre otros.
En este tema se mostrarán los métodos básicos como la técnica de luz estructurada para la medición de superficies en 3D para su aplicación. Métodos de codificación se utilizan para resolver el problema de la correspondencia entre los puntos proyectados en una superficie y el punto en el plano de la imagen en el plano del sensor se enfatizan. El principio general en el que los sistemas se basan de luz estructurada para obtener información tridimensional en medir superficies se basa en el método de triangulación.
El desarrollo para un sistema de visión 3D requiere la solución de una serie de aspectos o etapas: la recuperación de la estructura tridimensional de la escena, el modelado y el objeto de representación, el reconocimiento y la localización, y la interpretación de la escena. Las diferentes técnicas para recuperar la estructura tridimensional de la escena tienen características específicas en todos los niveles del proceso de interpretación visual, desde las imágenes iniciales, el análisis y la interpretación de la misma, todos los métodos requieren equipos específicos para la solución de algoritmos.
Triangulación y luz estructurada.
Dentro del campo de visión tridimensional, hay una serie de técnicas que actualmente se utilizan con éxito en numerosas aplicaciones industriales. Entre ellas, la que se conoce como luz estructurada. Este tipo de sistema se caracteriza por un método directo y activo. Un método directo se caracteriza porque las conclusiones se pueden obtener mediante el análisis de los datos obtenidos directamente de las imágenes. En cuanto al método activo, se tiene en cuenta que este sistema utiliza un sistema generador de luz, lo que introduce un tipo de energía con el medio ambiente en el que se realizó el estudio.
El sistema de luz estructurada se basa en el estudio de la deformación de un patrón de luz para ser interceptado por cualquier objeto. Este es el principal problema con este tipo de herramientas que se necesita un tipo de luz concentrada en un punto. Como este podría no encontrarse iluminado, cualquiera de los sistemas usuales que se utilizan actualmente, tales como bombilla, focos fluorescentes, etc., están compuestos por ondas de diferentes frecuencias causando que el rayo de luz sea utilizado a través del medio ambiente.
Una de las mejores soluciones es utilizar un rayo láser. Debido a sus características de la coherencia, la divergencia y de direccionamiento, se comporta en una luz perfecta para dichos sistemas. Esto es debido a que la consistencia hace que todas las ondas tengan la misma frecuencia, y con su pequeña divergencia y alta directivita permiten que se dirija un rayo láser en cualquier punto que se desee. Una vez que usted y el tipo de luz que se utilizará es conocido, es necesario elegir un modelo adecuado. Las diferentes soluciones que van desde el uso de rejillas con puntos de láser de diferentes colores. La contratación de puntos significa tener para atravesar el objeto a través de la superficie de tomar una gran cantidad de puntos y algunas áreas pueden perderse.
El uso de un plano parece una solución mejor que la anterior. El plano ilumina un conjunto de puntos con las mismas características y cumplen con la condición de un plano en el espacio. Utilizar una cuadrícula con diferentes puntos de color envueltos implica que tiene toda la superficie del objeto iluminado y una vez que el problema es encontrado, se buscan los diferentes puntos y situaciones. Por supuesto, además del patrón de luz, necesita una cámara que recoge todas las imágenes de la deformación del plano del láser. La posición de la cámara en el conjunto debe ser uno, lo que permite obtener tanto la mejor resolución como prevenir las áreas oscuras, es decir, no hay zonas del objeto que no están iluminadas por el láser.
Una vez que se haya decidido sobre uno u otro patrón y la cámara correspondiente tendrá que calibrar los diferentes parámetros. Este paso es el más importante como para las coordenadas de diferentes puntos en el objeto es emplear el método de triangulación. El método de triangulación se utiliza para obtener la posición de un punto con relación a la posición de la cámara y el plano. La siguiente figura explica el esquema del método de triangulación:
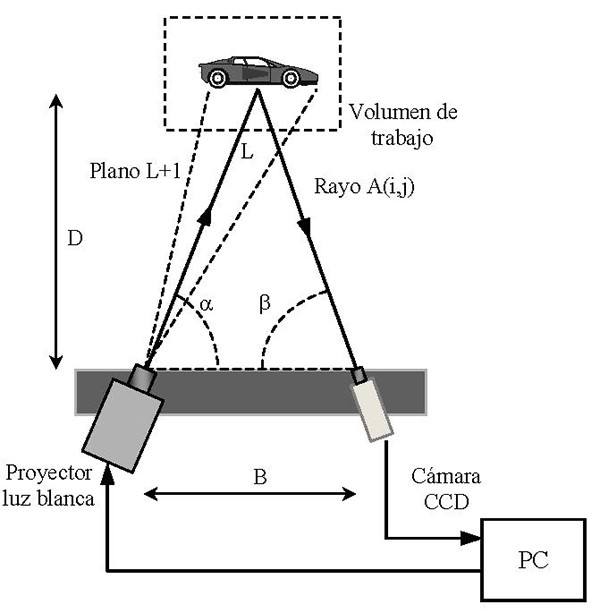
Imagen obtenida de http://www.e-medida.es/documentos/Numero-3/control_dimensional_tecnologia_luz_blanca_celdas_inspeccion Sólo para fines educativos.
Si se conoce la distancia de la cámara a un punto de objeto, que es la base del triángulo, la distancia entre la cámara y el láser, un lado, y el ángulo del plano del láser, podemos ver las coordenadas tridimensionales de ese punto. Pero para ello es necesario conocer las posiciones en el espacio tanto de la cámara y el plano de láser, por lo que será es necesario, un proceso de calibración en ambos sistemas. Los patrones proyectados están diseñados de manera que cada píxel de la imagen se le puede asignar un código bien definido. La proyección de Técnicas de tales patrones pueden ser de clasificación de acuerdo a la estrategia de codificación utilizado, divididos en tres grupos:
- Tiempo de multiplexación técnica
- Técnicas espaciales de vecindad
- Codificación directa
En nuestro caso consideramos sólo el tiempo de las llamadas técnicas multiplexados uno de los más extendidos en sistemas comerciales para la exploración de luz estructurada en tres dimensiones. Entre las técnicas de multiplexación una de las más importantes es la siguiente:
Patrones de nivel de gris binarios y codificación técnica.
La codificación binaria utiliza rayas blanco y negro para formar una secuencia de patrones de proyección, de modo que cada punto de la superficie del objeto tiene un código binario único, el cual difiere de cualquier otro código en diferentes puntos. En general, los patrones de rayas pueden codificarse con 2n.