Contexto
Es precisamente en esta condición cuando se les exige a las llantas tractivas que proporcionen su mayor torque con suficiente adherencia. En la figura se muestra el diagrama de cuerpo libre general interviniendo la fuerza aerodinámica (FA), las de resistencia al rodamiento (Rr), las de gravedad, y las fuerzas tractivas; estas últimas (tractivas y de gravedad) señalándolas en color rojo para su diferenciación.

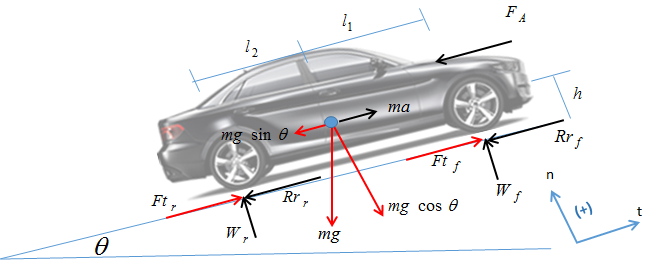
Diagrama de cuerpo libre de automóvil cuesta arriba.
Donde:
Ftf : Fuerzas tractivas delanteras
Ftr : Fuerza tractiva traseras
Rrf : Fuerzas de resistencia al rodamiento delanteras
Rrr : Fuerzas de resistencia al rodamiento traseras
FA : Fuerza de resistencia aerodinámica
Wf : Fuerzas de resistencia normales en ejes delantero
Wr : Fuerzas de resistencia normales en ejes trasero
mg : Fuerza de gravedad
m : Masa total del vehículo
a : Aceleración
g : Gravedad
θ : Ángulo de la pendiente
h : Altura del centro de gravedad con respecto al piso
I1 : Distancia del eje delantero al centro de gravedad
I2 : Distancia del eje trasero al centro de gravedad