Determine la fuerza tractiva que se necesitará para poder circular un automóvil Jetta Clásico cuyos datos técnicos aparecen en la tabla adjunta. Se pide tomar en consideracióno los datos que se proporcionan en un ciclo de manejo que durará 22 segundos tal y como se muestra en la tabla 1 en los cuales se incluye también velocidades promedio, aceleraciones, distancias recorridas y sus modos de operar.
| Peso vacío (kg) |
1307 (kg) |
| Peso 2 pasajeros |
150 Kg |
| Factor de resistencia rodamiento |
0.02 |
| Coeficiente de arrastre |
0.36 |
| Área frontal |
1.9 m2 |
| Densidad del aire |
1.225 Kg/m3 |
Figura 2. Imagen de Jetta Clásico 2015.

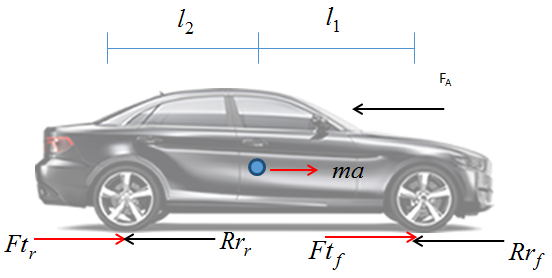
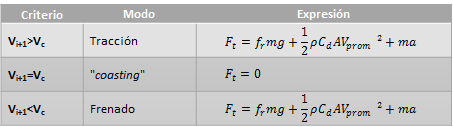
Se iniciará con el instante inmediato cuando comienza el movimiento y el vehículo pasará del reposo a una velocidad de 3.8 km/h, la aceleración es de 1.056 m/s2 y la tabla identifica que está en modo tracción, entonces se tomará la ecuación correspondiente para la fuerza tractiva:
Para este instante de tiempo la velocidad promedio (tercera columna) es cero, entonces la resistencia aerodinámica es cero y solamente nos preocuparemos por la resistencia al rodamiento y la inercia.




La fuerza tractiva total para este instante será de 1823.8 N tal como se ve en la tabla:

Para el instante t=2 seguimos teniendo modo tracción y obtenemos ahora:

Repitiendo el mismo procedimiento para todos los instantes, se tiene la tabla completa:
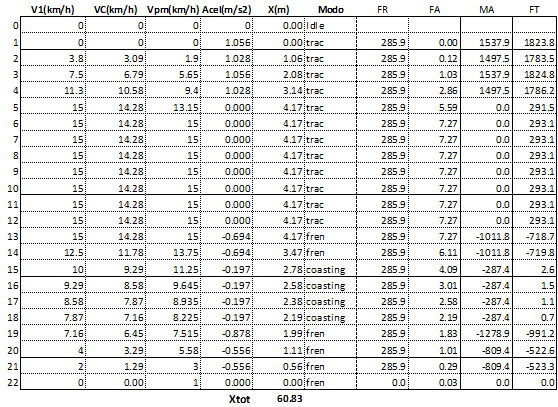
De la tabla se derivan las siguientes observaciones:
- Los primeros instantes entre de 0 a 4 segundos, el automóvil se encuentra acelerando por lo que su modo es obviamente tracción, lo cual es evidente por el aumento de velocidad y por la fuerza requerida para impulsar la masa (penúltima columna).
- Los instantes correspondientes desde 5 a 12 segundos, el vehículo también se encuentra en modo tracción pero a velocidad constante de 15 km/h lo cual es necesario para vencer las fuerzas de rodamiento y aerodinámica. Note que en estos instantes no hay fuerza inercial (MA) y la fuerza de tracción (FT) sólo se compone de la resistencia al rodamiento (FR) y aerodinámica (FA).
- En los segundos 13 y14 el automóvil comenzará a frenar. Note que la aceleración es negativa y por ende la fuerza inercial (MA) es negativa. Asimismo la fuerza total tractiva ahora es negativa queriendo decir que se necesitará ahora una fuerza contraria para detener el auto la cual deberá provenir pisando el pedal del freno.
- Del instante 15 al 18 no es necesario forzar el vehículo a desacelerarlo, ya que con sólo soltar el pedal del acelerador el vehículo se desacelerará en forma natural siguiendo las velocidades del ciclo de manejo sin necesidad de pisar el freno. En esta situación, la fuerza tractiva es cero. Note que en la hoja de cálculo el resultado no es exactamente cero, pero para fines prácticos las fuerzas tractivas totales que se muestran son despreciables (menores a 2.5 N), solamente basta con identificar que el vehículo se encuentra en modo coasting.
- Finalmente, del segundo 19 al 22 el conductor deberá pisar el pedal del freno nuevamente hasta detenerlo completamente.
- Por último, la distancia total recorrida fue de 60.83 m.