Durante el rodaje de un vehículo, éste deberá vencer fuerzas de resistencia tales como inercia, aerodinámicas, pendientes y de rodamiento. En este tema se abordará el concepto de resistencia al rodamiento, la cual consiste en una fuerza opuesta al movimiento que se genera debido al efecto de histéresis del (los) neumático(s) durante un rodaje. En la siguiente figura se ilustra en rojo la resistencia al rodamiento en los neumáticos, la cual es opuesta al movimiento.
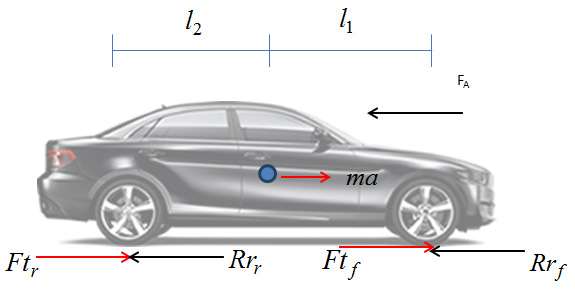
Figura 1. Fuerzas aerodinámica, de resistencia al rodamiento y tractivas.
Donde:
Ftf : Fuerzas tractivas delanteras
Ftr : Fuerza tractiva traseras
Rrf : Fuerzas de resistencia al rodamiento delanteras
Rrr : Fuerzas de resistencia al rodamiento traseras
FA : Fuerza de resistencia aerodinámica
mg : Fuerza de gravedad
m : Masa total del vehículo
a : Aceleración
3.1 Histéresis como mecanismo de generación de fuerzas en las llantas
La generación de fuerzas en los neumáticos es debido a dos mecanismos principales:
Adherencia
- Corresponde a la fricción disponible entre el pavimento y el neumático en el sentido que este no pierda fricción, y por ende el control.
Histéresis
- Corresponde a la disipación de calor mediante la flexión de la carcasa del mismo neumático produciendo un deslizamiento, entendido como deslizamiento entre las fibras de la misma carcasa.
El deslizamiento generado es absolutamente necesario para que la llanta tenga capacidad de frenado, aceleración y agarre lateral. Por otro lado, este mismo mecanismo produce pérdida de energía generando una fuerza de resistencia que se opone al movimiento cuando la llanta está rodando; es éste el que nos concierne en este tema por lo que se le dedicará un espacio adecuado. El efecto de histéresis consiste en la pérdida de energía generada por un material después de aplicarse sobre él una fuerza de compresión y de tensión. Un material idealmente elástico no generará ninguna pérdida y su curva de Fuerza-Deformación será idéntica tanto al comprimirlo como al expandirlo, sin embargo, para un material con histéresis, habrá una pérdida de energía dado que su recuperación no llegará a su punto original; esto se hace evidente al graficar la curva Fuerza-Deformación (figura 2). Además de que no existe un material 100% elástico para el caso particular de las llantas, el efecto de histéresis es necesario como un mecanismo adicional además de la fricción para generar fuerzas longitudinales si son de frenado/aceleración o laterales en caso de vueltas. Por otro lado se compromete la energía disponible en situaciones de avance, tal es el caso de la resistencia al rodamiento, la cual deriva en pérdida de energía como se discutirá a continuación.
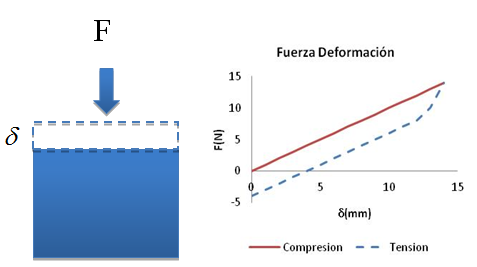
Figura 2. Efecto de histéresis.
La gráfica anterior nos sugiere que la fuerza de compresión es mayor a la de tensión, por lo que en una rodada libre (sin pisar el pedal del freno ni el del acelerador), el neumático sufre compresión en su parte delantera y tensión en su parte trasera; lo anterior debido al efecto de disminución del radio por la flexibilidad del neumático en la proximidad de la pisada. En la figura 3, puede observarse lo que sucede en un neumático durante una rodada libre; debido a la elasticidad de la llanta, la longitud del radio rA va disminuyendo desde el punto A, pasando por B y llegando hasta el punto de máxima compresión C; enseguida se vuelve a extender pasando por D y finalmente llegando al punto E para recuperar su posición original. Dado que la velocidad angular de giro de la llanta no cambia, es obvio que la velocidad tangencial irá disminuyendo en la trayectoria ABC causando predominantemente compresión en el caucho, mientras que la tensión será predominante en CDE. Como las fuerzas de compresión son mayores que las de tensión, esto origina una distribución de presión no uniforme a lo largo de la pisada, cuya resultante se encuentra sesgada hacia adelante (figura 4). El mecanismo de generación de dicha fuerza es un poco más complicado que lo que se expone, pero el concepto simplificado se puede abstraer de esta forma en el que dicha fuerza es ocasionada por la histéresis de la llanta, y por ende, hay una pérdida de energía.
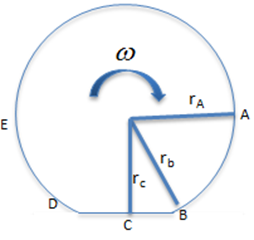
Figura 3. Disminución de radio en neumático durante rodada.
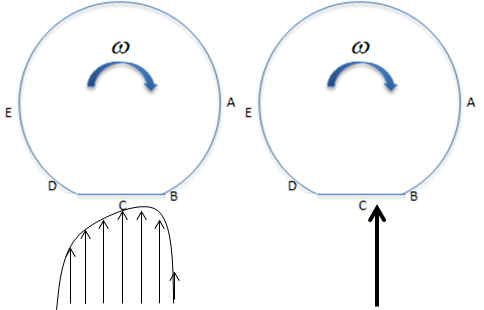
Figura 4. Asimetría en distribución de presión por resistencia al rodamiento.
La fuerza resultante obtenida genera un par M1 contrario al movimiento de la llanta mismo que es balanceado por una fuerza P2 como se muestra en la figura 5. Esta fuerza P2 es en realidad una fuerza de reacción entre la suspensión y el centro de la llanta que, visto de otra forma, es como si la llanta fuera empujada hacia adelante por la suspensión o la suspensión fuese empujada hacia atrás por el apoyo de la llanta resultando así en una fuerza en dirección contraria al movimiento del vehículo, y por ende con tendencia a detener el automóvil como se indica en la figura 5 lado derecho.
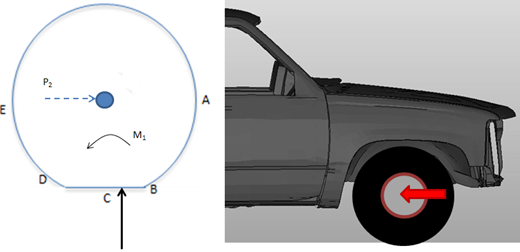
Figura 5. Aplicación de fuerza de resistencia al rodamiento en centro de la llanta.
La interacción anterior entre el centro de la llanta y la suspensión obedece al principio de la tercera ley de Newton consistente en que a toda acción corresponde una reacción igual y opuesta.
3.2 Fuerza y torque para vencer resistencia al rodamiento
Las fuerzas de resistencia al rodamiento Fx está asociada con la fuerza normal Fz recibida en la llanta en ese instante; dicha relación se expresa de la siguiente forma:
Donde f es el factor de resistencia al rodamiento
El factor de resistencia al rodamiento es un factor empírico que a su vez varía con el cuadrado de la velocidad, el tipo de pavimento, la presión de las llantas, y la fuerza normal como ya se indicó y sobre todo el tipo de llanta. Existe una literatura muy amplia para profundizar en el tema. La tabla siguiente muestra algunos factores de resistencia al rodamiento que podrán utilizarse de forma simplificada cuando la velocidad del vehículo no sea muy alta y dependiendo del tipo de pavimento.
| Superficie |
Factor (f) |
| Autopista |
0.008-0.01 |
| Grava |
0.02 |
| Calles |
0.03 |
| Superficie Rugosa |
0.05 |
| Arena |
0.15-0.3 |
Tabla 1. Factores de resistencia al rodamiento para diversos tipos de superficies.
Una forma más precisa es considerar el factor de resistencia al rodamiento como función de la velocidad de giro de las llantas en forma cuadrática, que por facilidad muchos autores que han explorado el tema sugieren expresiones en función de la velocidad del vehículo por ser más medible e intuitiva. Para hacer un cálculo más preciso del factor de resistencia al rodamiento habría que abundar mucho más en el tema, aunque para efectos del objetivo del presente módulo se utilizarán las expresiones sugeridas por Wong debido a su generalidad para dos tipos de llanta y de vehículos, todas ellas durante rodada sobre pavimento suave (autopista).

Tabla 2. Factores de resistencia al rodamiento en función de la velocidad del vehículo (Kmh).
Práctica 1: Estime la fuerza y torque necesarios para vencer la resistencia al rodamiento de un automóvil de 1500 Kg de peso a una velocidad de crucero de 40 km/h y que utiliza llantas bias ply. Por simplicidad se considera que el automóvil tiene su peso repartido de forma equitativa (375 Kg por llanta).
Haz clic para conocer la solución

Sistema Internacional de Unidades
Potencia (P) en Watts (W)
Torque (τ) en Newton-metro (Nm)
Velocidad angular (ω) en Radianes/segundos (rad/s)
Para conocer la potencia del ejemplo 1, se deberá encontrar la velocidad angular de la llanta a partir de la velocidad del vehículo. Se puede estimar dicha velocidad considerando el caso de un cilindro rígido que rueda sin deslizar sobre una superficie plana.
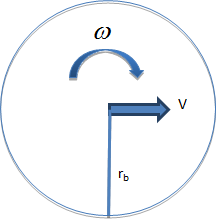
Figura 6. Velocidad tangencial de cuerpo cilíndrico que rueda sin deslizar.
De la figura 6 se tiene que:
Nótese que en la expresión anterior el radio es de 293 mm correspondiente a la mitad del diámetro de 586 mm.
3.3 Potencia y energía
Para obtener la potencia necesaria, se multiplica la fuerza total de resistencia al rodamiento (4 neumáticos) por la velocidad.
El trabajo necesario para vencer la resistencia al rodamiento, dependerá de la distancia recorrida:
Donde:
Wtot : corresponde al trabajo total
Fprom : Fuerza promedio
dtot : distancia total
En este caso la fuerza promedio es representativa cuando en un cierto recorrido la velocidad no se mantuvo constante y habrá que calcularla; esto es típico cuando se trabajó con un ciclo de manejo. Para el caso que estamos estudiando supondremos que la velocidad se mantiene constante.
Práctica 2: Estime la potencia necesaria para mantener el automóvil analizado (1500 Kg a 40 km/h) y que utiliza llantas bias ply.
Haz clic para conocer la solución
Hasta aquí se ha discutido cómo obtener la fuerza de resistencia al rodamiento, torque y potencia necesaria para vencer la fuerza de resistencia al rodamiento partiendo de un coeficiente en función de la velocidad. No obstante, es necesario indicar que existen expresiones que incluyen más parámetros (además de la velocidad) que también contribuyen a la resistencia al rodamiento, por ejemplo, una expresión más completa para la obtención del factor de resistencia al rodamiento (fr) es sugerida por la Sociedad de Ingenieros Automotrices (SAE); en dicha fórmula además de la velocidad se involucran también la presión de las llantas y la fuerza normal.
Donde:
K : factor empírico = 0.8 para llantas radiales y 1.0 para Bias Ply
Fz : Fuerza normal por llanta (N)
P : Presión (Pa)
V : Velocidad (m/s)
Práctica 3: Estima la resistencia al rodamiento y potencia necesaria para mantener un automóvil de 1500 Kg de peso a una velocidad de crucero de 50 km/h y que utiliza llantas bias ply a una presión de 32 libras por pulgada cuadrada*.
*En lenguaje coloquial normalmente se dice "inflar el neumático a 30 libras", aunque la expresión correcta es 30 libras por pulgada cuadrada.
Haz clic para conocer la solución
Práctica 4: La mayor parte de los vehículos compactos, son de tracción delantera y normalmente su peso se encuentra sesgado hacia adelante. Supón que el auto del ejemplo anterior pesa 1500 Kg con un 55 % repartido hacia adelante. Estima la potencia necesaria para mantener dicho automóvil a una velocidad de crucero de 50 km/h y que utiliza llantas bias ply a una presión de 32 libras por pulgada cuadrada*.
Haz clic para conocer la solución
En la siguiente figura se hace un barrido de velocidad desde 10 hasta 200 km/hr, donde se muestra la variación de resistencia al rodamiento y potencia para el mismo vehículo para dos casos de calibración de llantas, uno a presión normal de 30 libras por pulgada cuadrada y otro a 25 para obtener el efecto de llantas bajas. Ambos casos utilizan el mismo tipo de llantas bias ply.
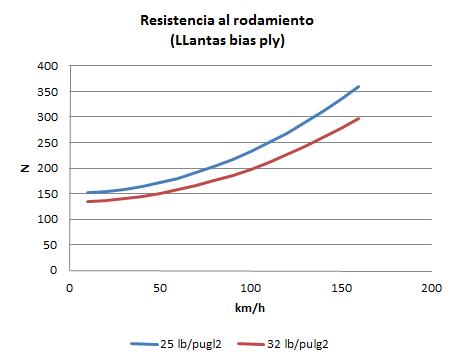
Figura 7. Resistencia al rodamiento a diferentes velocidades para llantas calibradas a diferentes presiones.
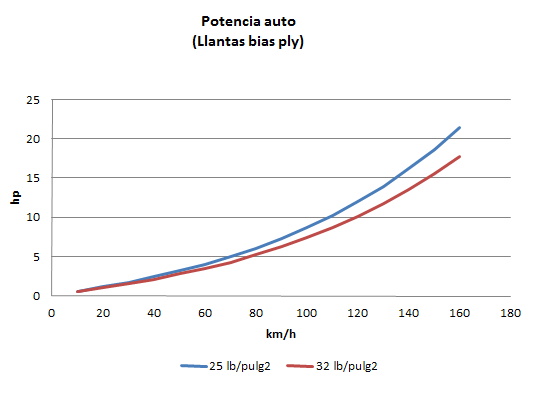
Figura 8. Potencia requerida a diferentes velocidades para llantas calibradas a diferentes presiones.