6.1 Ecuaciones de movimiento
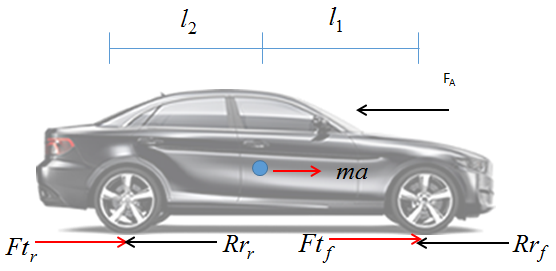
De acuerdo a la segunda Ley de Newton en la cual se establece que la fuerza para mover un cuerpo de masa finita (m) es directamente proporcional a su aceleración (a). En otras palabras, para ocasionar un cambio de velocidad en un objeto de masa m, es necesario aplicar una fuerza, la cual es proporcional a su aceleración, y no es otra cosa más que la razón de cambio de velocidad en un intervalo de tiempo.
Como el vehículo no efectuará cambios de velocidad, la ecuación se reduce a:
Para efectos de facilitar la compresión del análisis, se han simplificado la fuerza tractiva en las llantas en una total (Ft), así como la resistencia al rodamiento (Rr). La anterior ecuación indica que la fuerza tractiva total deberá ser de tal magnitud para poder vencer las fuerzas de resistencia aerodinámica y de rodamiento que se determinan como sigue:
Donde:
𝜌 : Densidad del aire
A: Área frontal
Cd : Coeficiente de arrastre
V : Velocidad del vehículo
Asimismo, la fuerza de resistencia al rodamiento se denotará como sigue:
Donde:
fr : Factor de resistencia al rodamiento
m: Masa total del vehículo
g : Gravedad
6.2 Ejemplos y aplicaciones
Determine la fuerza tractiva, torque y potencia necesaria para mantener un automóvil Jetta Clásico de 1307 kg de peso a una velocidad de crucero de 100 km/h. Considere además la carga de dos pasajeros de 75k g cada uno.
| Peso vacío (kg) |
1307 (kg) |
| Área frontal |
1.91 m2 |
| Factor de resistencia al rodamiento |
0.02s |
| Llantas |
205/55R16 |
| Radio llanta |
316 mm |
| Factor de arrastre (Cd) |
0.36 |
Imagen de Jetta Clásico 2015
Imagen obtenida de http://www.vw.com.mx/. Sólo para fines educativos.
Considerando los datos de la ficha técnica, para mantener el vehículo a velocidad constante de 100 km/h.
Nota que la velocidad fue transformada de km/h a m/s dividiéndola por 3.6.
El torque en las ruedas está dado por:
Este torque de 192.48 equivale al torque total en las ruedas, lo que quiere decir es que el torque por rueda (en caso de ser un eje tractivo solamente) deberá ser de 96.24 Nm.
La potencia está dada por:
Donde Potv significa potencia requerida en el vehículo para mantenerlo a 100 km/h. Es decir, se necesitan 16.92 Kw para vencer las fuerzas de resistencia al rodamiento y aerodinámica a esa velocidad. Sin embargo, se deben conocer los datos que se necesitarán en el motor eléctrico.
Suponga que se utilizará una reductora de 4:1, ¿cuál deberá ser el par y las revoluciones a la cual estaría operando un motor eléctrico EVO AFM-140 cuyos datos de ficha técnica aparecen a continuación?
Rendimiento y eficiencia del motor
Imagen obtenida de http://www.evo-electric.com/inc/files/AFM-140-Spec-Sheet-V1.1.pdf . Sólo para fines educativos.
Se comenzará por asociar la potencia del motor con la potencia necesaria para mantener el vehículo en operación. Si la energía fuera transmitida desde el motor hasta las ruedas sin pérdida, la potencia sería la misma, sin embargo, como puede observarse en las curvas del motor, éste tiene también pérdidas, entonces la ecuación de potencia queda como sigue:
Donde PotV, potencia del vehículo o potencia entregadas en las ruedas, Potm potencia del motor y 𝜂 eficiencia.
Para poder ubicar el rango de operación correcto, se necesitan dos coordenadas: el torque del motor y su velocidad en rpm. Se comenzará por determinar la velocidad angular (rpm) del motor partiendo de la velocidad de las ruedas. Esta última se determina considerando que el vehículo circula a 100 km/h (27.77 m/s), que equivale a una velocidad angular de las llantas de 839 rpm:
Pero dicha velocidad es amplificada por la reductora:
El torque en las ruedas se ha obtenido en el ejemplo 1 y es de 192.48 Nm, lo que significa que, por el efecto de la reductora, éste se verá disminuido por un factor de 4, siendo aproximadamente de 48.12 Nm. Sin embargo, este par sería el correcto si no existieran pérdidas en el motor, entonces ubicando las coordenadas (3359, 48.12) en el diagrama, ves que puedes escoger una curva con eficiencia del 90%, quedando entonces el par como:
El procedimiento anterior se puede repetir para varias velocidades, por ejemplo, la tabla siguiente muestra los datos desde 0 hasta 110 km/h:
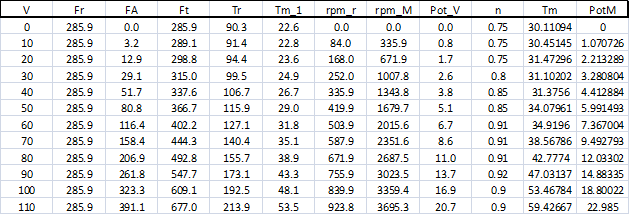
Es importante resaltar que las velocidades que aparecen en la tabla anterior indican situaciones a velocidad constante (no aumentos de velocidad), y a mayor velocidad se requiere mayor potencia en el vehículo. Los cálculos indican que a velocidad cero no se necesitará de potencia alguna, por lo que el dato que aparece en la tabla de resistencia al rodamiento de 285.9 podrá ser interpretado como la fuerza tractiva que se necesitará para vencer la resistencia al rodamiento cuando el vehículo está en reposo. A esta situación se le conoce como "Ralenti" que suele ser una velocidad muy baja entre 2 y 5 km/h.