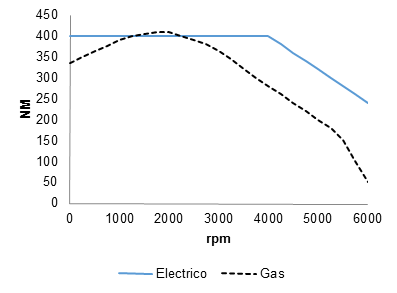
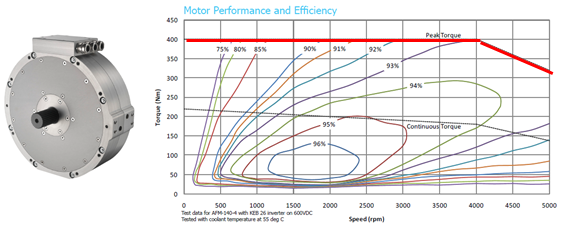
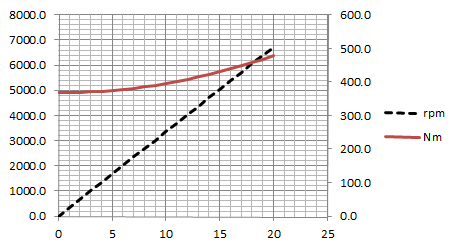
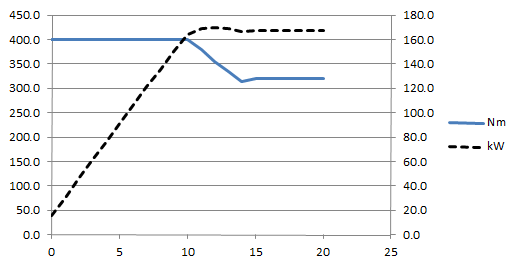
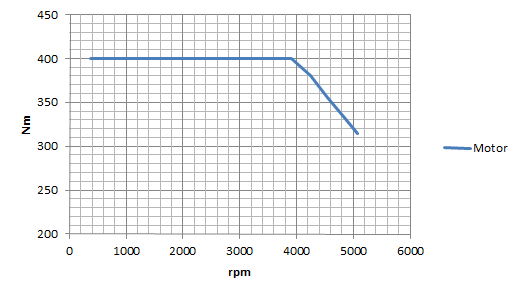
De las especificaciones técnicas del motor se puede observar que su torque máximo es de 400 Nm hasta una velocidad crítica (ωc) de 4000 rpm, y luego comienza declinar de forma lineal hasta 320 Nm justo al alcanzar 5000 rpm. Aquí es necesario indicar que estás observando la línea roja de la figura 3 correspondiente al torque máximo, dado que la situación que se está analizando es precisamente la exigencia de aceleración máxima y se espera que ésta sea alcanzada en un rango menor a los 20 segundos. Las especificaciones del motor indican que pueden soportar dicho torque hasta por 60 segundos, entonces se percibe factible asumir que el motor tendrá capacidad para alcanzar el requerimiento. Entonces se pueden expresar dos rangos de operación:
Donde:
ωc : 4000 rpm
ωmax : 5000 rpm y ω está dado en rpm
El estudiante podrá comprobar fácilmente la veracidad de las dos ecuaciones bilineales anteriores, sustituyendo los datos de la velocidad angular (rpm) a la par con la ficha técnica del motor.
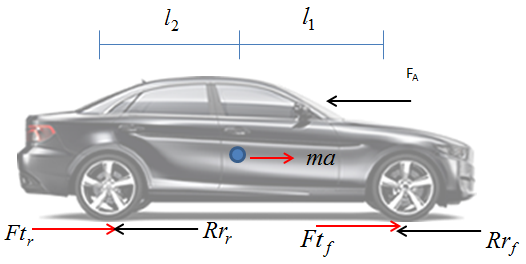
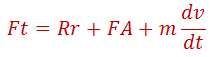
Para incluir estas dos condiciones en la ecuación de equilibrio se deberá expresar T(t) en función de la fuerza tractiva (Ft). Para esto se revisarán las relaciones de potencia entre ruedas tractivas y motor:
Donde:
Potr : 4000 rpm
Potm : Potencia del motor
η : Eficiencia
Por otro lado, se sabe que hay una reducción de velocidad en las ruedas con respecto al motor debido al diferencial utilizado que en este caso es de 4:1.
Donde:
Potr : Velocidad angular de las ruedas tractivas (rpm)
Potm : Velocidad angular del motor (rpm)
G : Relación de reducción
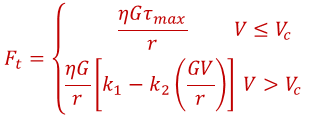
Haciendo las sustituciones correctas puedes expresar la fuerza tractiva en términos del torque del motor como sigue:
Es necesario expresar las dos situaciones del par en las ruedas en términos tractivos para articularlo al lado izquierdo de la ecuación de movimiento. Para el caso del primer rango de operación cuando ω ≤ ωc, se considera el par máximo y la ecuación queda como sigue:
Donde G es la razón de reducción que en el presente caso es 4:1 y τmax es el par máximo (400 Nm en este caso).
Para el segundo rango de operación donde ω > ωc considera:
Donde k1= 720 y k2=-0.08. Por otro lado es necesario expresar ωm en términos de V como sigue:
Dado que el par depende de la magnitud de la velocidad angular del motor con dos rangos de operación (como ya se indicó) marcados por la velocidad crítica ωc; se expresará a continuación dicha velocidad en términos de la velocidad del vehículo, la cual denotarás como crítica (Vc), quedando:
También se puede expresar Vc en términos de wc:
Asimismo, para Vmax = 148.8 km/h correspondiente a 5000 rpm del motor.
Sustituyendo queda:
El tipo de llantas 205/55R16 tienen un radio de 316 mm; por otro lado, la eficiencia del motor de acuerdo a la figura 2, se tomará como 93%. Entonces sustituyendo todos los datos en la primera ecuación bilineal queda:
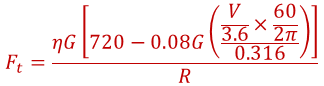
Asimismo para la segunda:
Nótese que la velocidad está dada en km/h, entonces fue dividida entre 3.6 para transformarla a m/s, lo que origina una velocidad angular en rad/s, sin embargo, los factores k1 y k2 fueron obtenidos con la base de velocidad angular en rpm, entonces se deberá multiplicar también por 60/2π para transformarse a rpm.
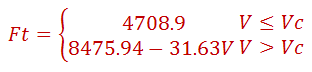
Entonces reacomodando las ecuaciones anteriores para Ft. queda:
Donde V está dada en km/h.
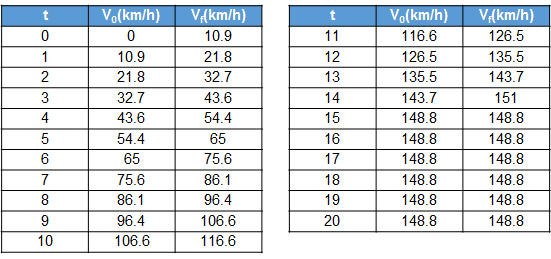
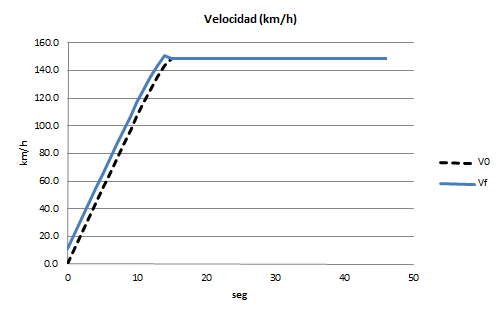
Ahora sí ya se tiene todo para empezar el análisis, la primera ecuación recursiva sucede cuando V≤Vc:
De la misma forma para el segundo rango de operación (V>Vc):
Finalmente y expresando las dos ecuaciones bilineales anteriores en sus dos rangos de operación:

Donde V está dada en km/h.