1.1 Posición angular
Para explicar el concepto de posición angular, comienza por repasar el concepto de posición lineal. Es muy fácil estar familiarizado con este concepto, ya que es algo que se vive todos los días y estas sumamente acostumbrados a medir y aproximar. Piensa en el siguiente ejemplo: ¿a qué distancia está el árbol del observador?

Figura 1
Ahora, ¿a qué distancia se encuentra el auto del observador?, ¿a qué distancia está el auto del árbol?
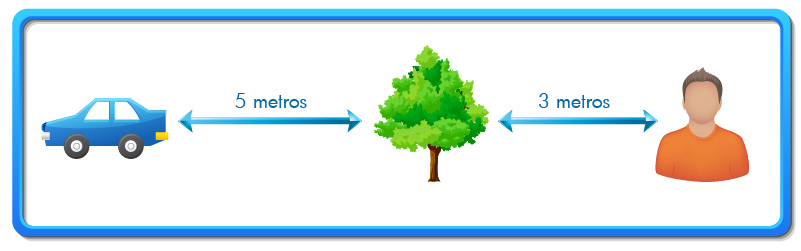
Figura 2
Puedes establecer fácilmente la cantidad de metros a la cual está un objeto respecto a otro, pero si quisieras contestar la pregunta: ¿dónde se encuentra el árbol respecto del observador?, necesitas ubicar el árbol en una posición respecto al observador, y para esto la distancia no basta. Es necesario incluir también una dirección.
Ahora puedes hablar de que el árbol se encuentra tres metros a la izquierda del observador, y el auto se encuentra a cinco metros a la izquierda del árbol.
Resulta muy sencillo entender el concepto de distancia y posición lineal. Ahora trata de llevar este concepto a un sistema en dos dimensiones. Es decir, donde tu ubicación no puede ser determinada únicamente hablando de derecha (positivo) e izquierda (negativo), sino también arriba (positivo) y abajo (negativo). ¿A qué distancia está el globo del observador?
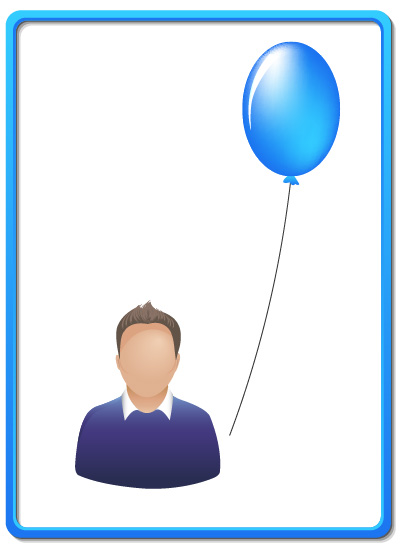
Figura 3
Es evidente que —para describir la posición del globo respecto al observador— necesitas la distancia horizontal, así como la distancia vertical. La distancia total a la que se encuentra el globo del observador es la longitud de la cuerda del globo y se expresa como:
Sin importar como cambien estas cantidades, la longitud de la cuerda siempre seguirá siendo la misma. Si tratas de imaginar que el globo gira alrededor del observador siguiendo la trayectoria de un círculo, siempre limitado por la distancia de su cuerda y sólo cambiando de posición, resulta impráctico estar describiendo las coordenadas X y Y constantemente, ya que la longitud de la cuerda es constante.
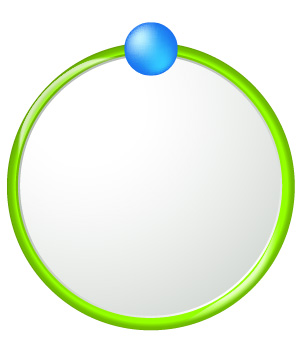
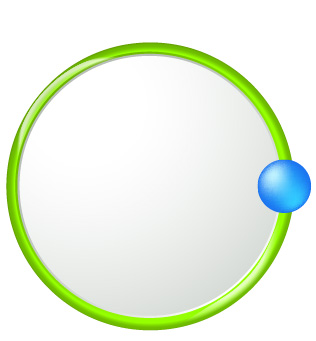
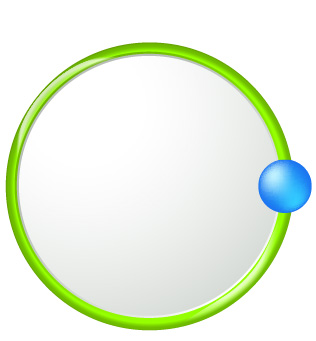
Puedes decir entonces que la posición del globo se define únicamente por la posición angular que tiene con respecto a una referencia establecida. Es decir, la cantidad de grados o radianes que separan al globo de la referencia. Se ilustra con la figura 4.
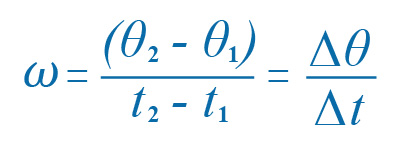
La referencia es la posición horizontal del globo. La posición angular se puede definir con la separación que tiene el globo en la segunda posición con respecto a la referencia. El desplazamiento angular es la diferencia en grados entre la posición final y la inicial.
Es posible utilizar los grados para hacer una descripción gráfica de la posición angular, pero matemáticamente esto es incorrecto. Se deben utilizar radianes, ya que estos son una unidad adimensional y sólo así pueden ser válidas nuestras ecuaciones.
Para facilitar los cálculos, se toma como referencia el eje horizontal (X) como el punto de partida (cero radianes). Por convención, el movimiento en contra de las manecillas del reloj (es decir, antihorario) se denomina positivo, mientras que el movimiento en dirección de las manecillas del reloj u horario se denomina negativo.
La posición angular se define tradicionalmente por la letra griega Theta θ. El desplazamiento angular es el cambio en posición angular entre dos observaciones distintas.
Resulta evidente que al estar moviéndote en círculo puedes afirmar lo siguiente:
- Una vuelta completa al círculo equivale a un desplazamiento de 2π radianes. Media vuelta equivale a p radianes. ¼ de vuelta equivale a π/2 radianes, y así sucesivamente.
- Si el desplazamiento excede 2π radianes, se puede empezar de cero nuevamente y sumar la cantidad de radianes recorridos a 2π.
- A partir de la referencia, hablar de un desplazamiento de 11π/6 radianes (330°) equivale a un desplazamiento de –π/6 radianes (-30°).
Se sugiere al participante validar las afirmaciones previas en el siguiente diagrama.