8.1 Técnicas de control del motor de inducción
Los motores de inducción se comportarán de manera diferente dependiendo de la construcción que tenga. Las principales clasificaciones y características de motores son las siguientes:
| Tipo |
Par de arranque |
Deslizamiento máximo [%] |
Corriente de arranque |
Par máximo |
Aplicaciones típicas |
| Nema A |
Normal |
5 |
Media – alta |
Normal |
Ventiladores, bombas |
| Nema B |
Alto |
5 |
Baja |
Alto |
Ventiladores, bombas, aire acondicionado. |
| Nema C |
Alto |
5 |
Baja |
Alto |
Bombas |
| Nema D |
Muy alto |
13 |
Baja |
Muy alto |
Grúas |
Estas características están ligadas a la construcción de la máquina, por lo que una vez que se ha construido el motor, son imposibles de cambiar. El primer paso para el correcto control de un motor de inducción es su correcta selección.
Se deben analizar los requerimientos de la aplicación en particular. ¿Qué se desea?
- ¿La carga arrancará muchas veces al día?
- ¿La carga se mantendrá funcionando la mayor parte del día, o varios días seguidos?
- ¿La carga es pesada o ligera?
Después de considerar cómo va a estar funcionando la carga, el primer paso para el control del motor es la selección del mismo.
Cuando los motores de inducción se empezaron a implementar, el control de velocidad era prácticamente inexistente y estos funcionaban casi todo el tiempo cerca de sus parámetros nominales de operación. Sin embargo, en la segunda mitad del siglo XX, con el desarrollo de la tecnología en transistores y semiconductores, se desarrolló la electrónica de potencia y se abrieron las puertas para el control de los motores de inducción, lo cual ha incrementado exponencialmente la versatilidad en sus aplicaciones. A continuación se muestra un motor de inducción utilizado como parte del tren motriz de un Toyota Prius.

Figura 1. Motor eléctrico de un Toyota Prius.
Imagen obtenida de http://www.myprius.co.za/technical.htm solo para fines educativos.
Las técnicas de control de velocidad para un motor de inducción son principalmente:
- Control mediante cambio de número de polos: Difícil es implementar ya que requiere cambiar las conexiones de la máquina.
- Control mediante cambio de la frecuencia: La velocidad de giro de un motor de inducción depende directamente de la frecuencia de la línea de la cual se alimenta.
- Control mediante magnitud de tensión: El par producido por un motor de inducción está relacionado directamente con el voltaje de línea aplicado.
Las dos últimas técnicas de control han sido en gran parte posibles debido a la introducción de la electrónica de potencia en los llamados variadores de velocidad o como se les conoce popularmente, drives.
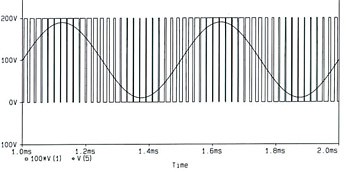
Estos funcionan produciendo una serie de pulsos, que mediante la modulación de ancho de pulso (PWM por sus siglas en inglés de Pulse Width Modulation) le entregan una señal al motor que puede tener valores variables de frecuencia y amplitud y por tanto se puede controlar de una forma muy precisa la velocidad de giro del motor, así como el par disponible en flecha.

Figura 2. Controlador de frecuencia variable para un motor de inducción.
Imagen obtenida de
http://en.wikipedia.org/wiki/File:Small_VFD_2.jpg solo para fines educativos.
Estos drives pueden tener un gran número de programas y funciones que hagan que el motor se comporte exactamente de la forma en que quieres. En la mayoría de las aplicaciones modernas, los motores se controlan con drives, incluyendo todos los componentes que encontrarás en un automóvil moderno.