Why RAID?
RAID
It is a technique that combines multiple disk drives into a logical unit (RAID set) and provides protection, performance, or both.
Today’s data centers house hundreds of disk drives in their storage infrastructure. Disk drives are inherently susceptible to failures due to mechanical wear and tear and other environmental factors, which could result in data loss. The greater the number of disk drives in a storage array, the greater the probability of a disk failure in the array.
For example, consider a storage array of 100 disk drives, each with an average life expectancy of 750,000 hours. The average life expectancy of this collection in the array, therefore, is 750,000/100 or 7,500 hours. This means that a disk drive in this array is likely to fail at least once in 7,500 hours.
RAID is an enabling technology that leverages multiple drives as part of a set that provides data protection against drive failures. In general, RAID implementations also improve the storage system performance by serving I/Os from multiple disks simultaneously. Modern arrays with flash drives also benefit in terms of protection and performance by using RAID.
In 1987, Patterson, Gibson, and Katz at the University of California, Berkeley, published a paper titled “A Case for Redundant Arrays of Inexpensive Disks (RAID).” This paper described the use of small-capacity, inexpensive disk drives as an alternative to large-capacity drives common on mainframe computers. The term RAID has been redefined to refer to independent disks to reflect advances in the storage technology. RAID technology has now grown from an academic concept to an industry standard and is common implementation in today’s storage arrays.
RAID Implementation Methods
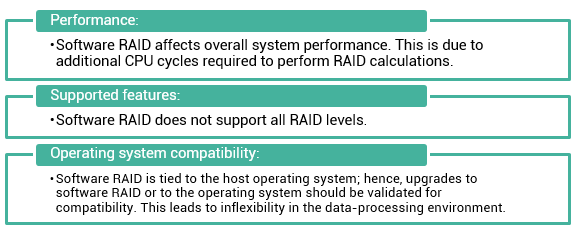
There are two methods of RAID implementation, hardware and software. Both have their advantages and disadvantages. Software RAID uses host-based software to provide RAID functions and is implemented at the operating-system level. Software RAID implementations offer cost and simplicity benefits when compared with hardware RAID. However, they have the following limitations:
In hardware RAID implementations, a specialized hardware controller is implemented either on the host or on the array. Controller card RAID is a host-based hardware RAID implementation in which a specialized RAID controller is installed in the host, and disk drives are connected to it. Manufacturers also integrate RAID controllers on motherboards. A host-based RAID controller is not an efficient solution in a data center environment with a large number of hosts. The external RAID controller is an array-based hardware RAID. It acts as an interface between the host and disks. It presents storage volumes to the host, and the host manages these volumes as physical drives. The key functions of the RAID controllers are as follows:

RAID Array Components
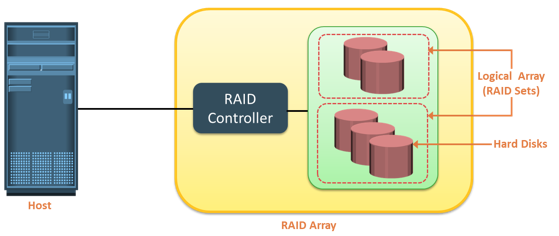
A RAID array is an enclosure that contains a number of disk drives and supporting hardware to implement RAID. A subset of disks within a RAID array can be grouped to form logical associations called logical arrays, also known as a RAID set or a RAID group.
RAID Techniques
RAID techniques –striping, mirroring, and parity –form the basis for defining various RAID levels. These techniques determine the data availability and performance characteristics of a RAID set.
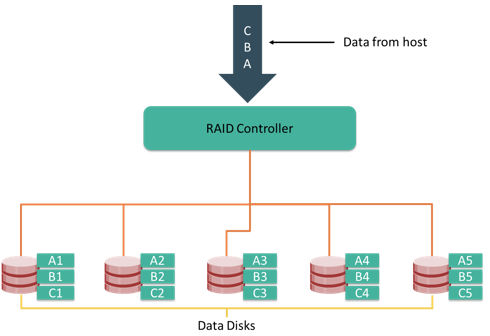
RAID Technique – Striping
Striping is a technique of spreading data across multiple drives (more than one) in order to use the drives in parallel. All the read-write heads work simultaneously, allowing more data to be processed in a shorter time and increasing performance, compared to reading and writing from a single disk.
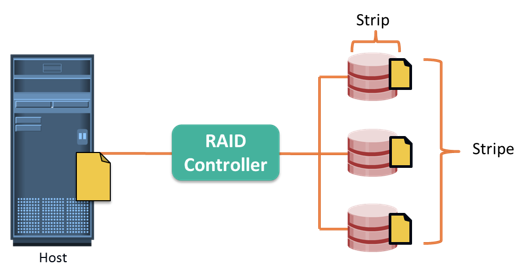
Within each disk in a RAID set, a predefined number of contiguously addressable disk blocks are defined as strip. The set of aligned strips that spans across all the disks within the RAID set is called a stripe. Figure on the slide shows physical and logical representations of a striped RAID set.
Strip size (also called stripe depth) describes the number of blocks in a strip, and is the maximum amount of data that can be written to or read from a single disk in the set, assuming that the accessed data starts at the beginning of the strip. All strips in a stripe have the same number of blocks. Having a smaller strip size means that the data is broken into smaller pieces while spread across the disks.
Stripe size is a multiple of strip size by the number of data disks in the RAID set. For example, in a five disk striped RAID set with a strip size of 64KB, the stripe size is 320 KB (64KB x 5). Stripe width refers to the number of data strips in a stripe. Striped RAID does not provide any data protection unless parity or mirroring is used.
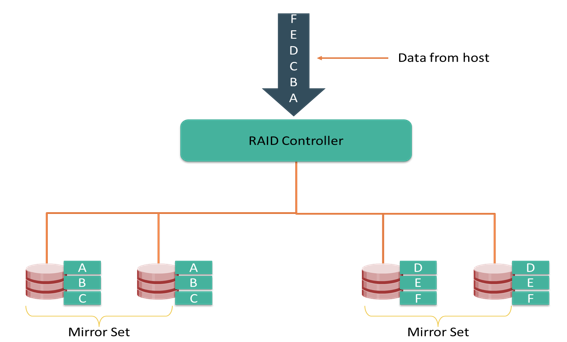
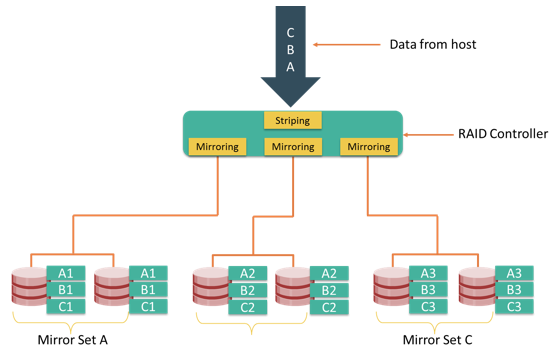
RAID Technique – Mirroring
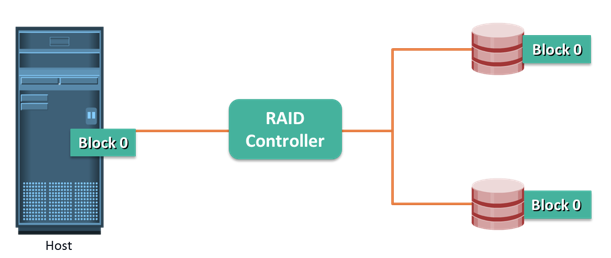
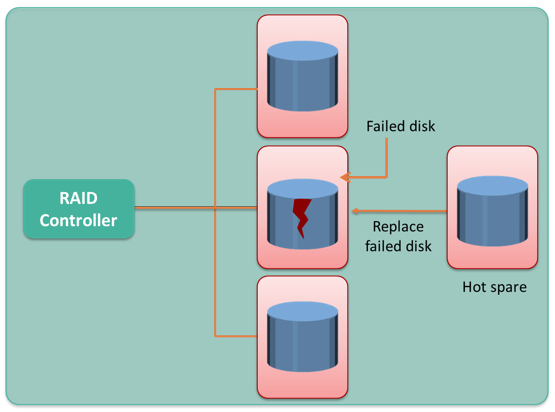
Mirroring is a technique whereby the same data is stored on two different disk drives, yielding two copies of the data. If one disk drive failure occurs, the data is intact on the surviving disk drive and the controller continues to service the host’s data requests from the surviving disk of a mirrored pair.
When the failed disk is replaced with a new disk, the controller copies the data from the surviving disk of the mirrored pair. This activity is transparent to the host.
In addition to providing complete data redundancy, mirroring enables fast recovery from disk failure. However, disk mirroring provides only data protection and is not a substitute for data backup. Mirroring constantly captures changes in the data, whereas a backup captures point-in-time images of the data.
Mirroring involves duplication of data—the amount of storage capacity needed is twice the amount of data being stored. Therefore, mirroring is considered expensive and is preferred for mission-critical applications that cannot afford the risk of any data loss. Mirroring improves read performance because read requests can be serviced by both disks. However, write performance is slightly lower than that in a single disk because each write request manifests as two writes on the disk drives. Mirroring does not deliver the same levels of write performance as a striped RAID.
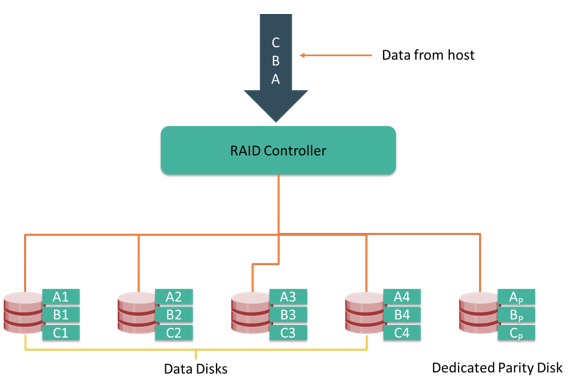
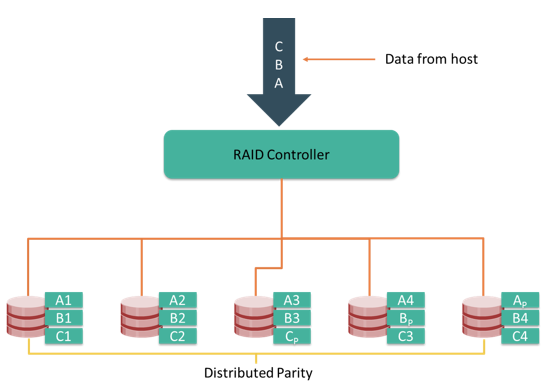
Parity is a method to protect striped data from disk drive failure without the cost of mirroring. An additional disk drive is added to hold parity, a mathematical construct that allows re-creation of the missing data. Parity is a redundancy technique that ensures protection of data without maintaining a full set of duplicate data. Calculation of parity is a function of the RAID controller.
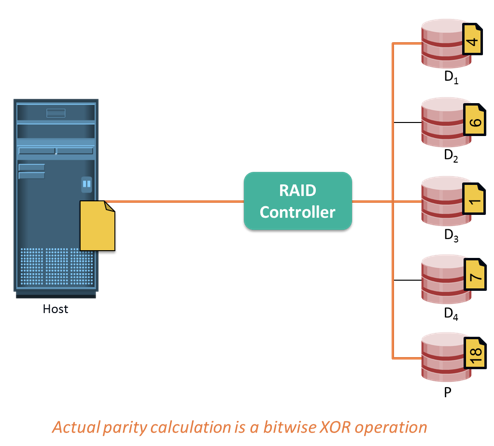
Parity information can be stored on separate, dedicated disk drives or distributed across all the drives in a RAID set. The first four disks in the figure, labeled D1 to D4, contain the data. The fifth disk, labeled P, stores the parity information, which, in this case, is the sum of the elements in each row.
Data Recovery in Parity Technique
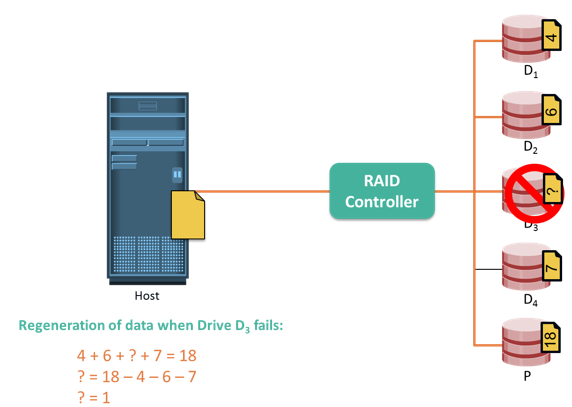
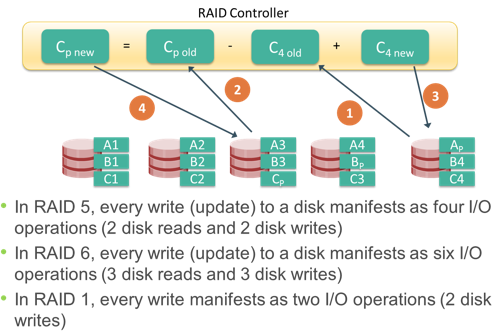
Now, if one of the data disks fails, the missing value can be calculated by subtracting the sum of the rest of the elements from the parity value. Here, for simplicity, the computation of parity is represented as an arithmetic sum of the data. However, parity calculation is a bitwise XOR operation.
Compared to mirroring, parity implementation considerably reduces the cost associated with data protection. Consider an example of a parity RAID configuration with five disks where four disks hold data, and the fifth holds the parity information. In this example, parity requires only 25 percent extra disk space compared to mirroring, which requires 100 percent extra disk space. However, there are some disadvantages of using parity. Parity information is generated from data on the data disk. Therefore, parity is recalculated every time there is a change in data. This recalculation is time-consuming and affects the performance of the RAID array.
For parity RAID, the stripe size calculation does not include the parity strip. For example in a five (4 + 1) disk parity RAID set with a strip size of 64 KB, the stripe size will be 256 KB (64 KB x 4).